ABB机器人的多任务(后台程序)指令是什么 点击:3582 | 回复:7

 此帖发自小程序
此帖发自小程序






发表于:2022-09-09 21:04:24
1楼
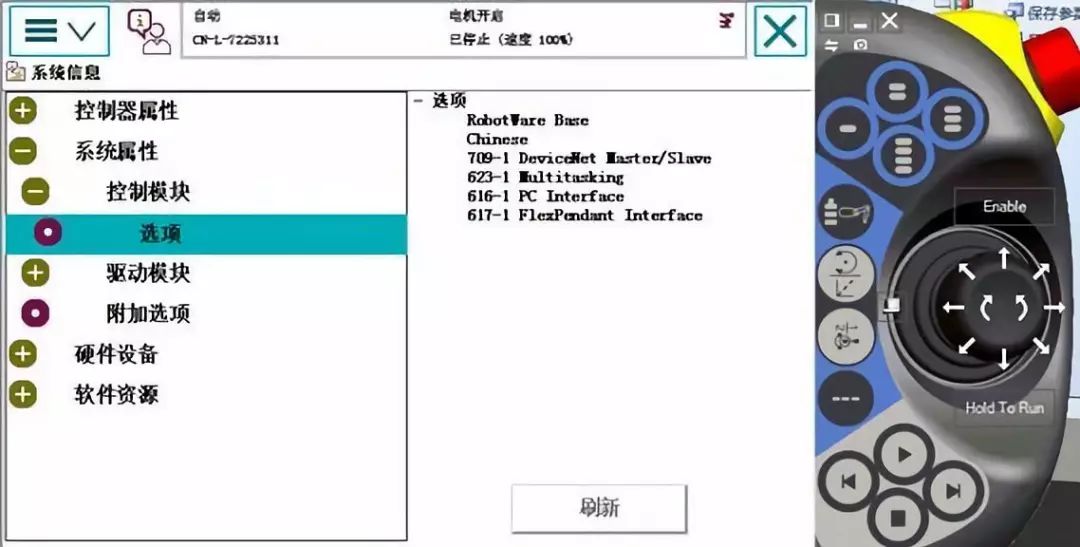
ABB机器人支持多任务(每台机器人本体最多一个运动任务)
使用多任务,机器人要有623-1 multitasking选项
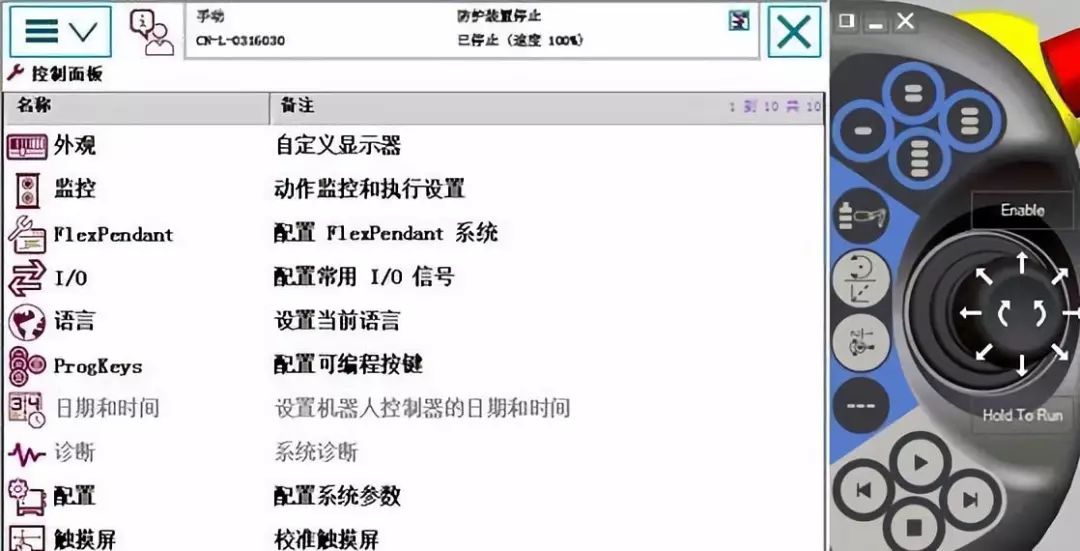
如何新建多任务?
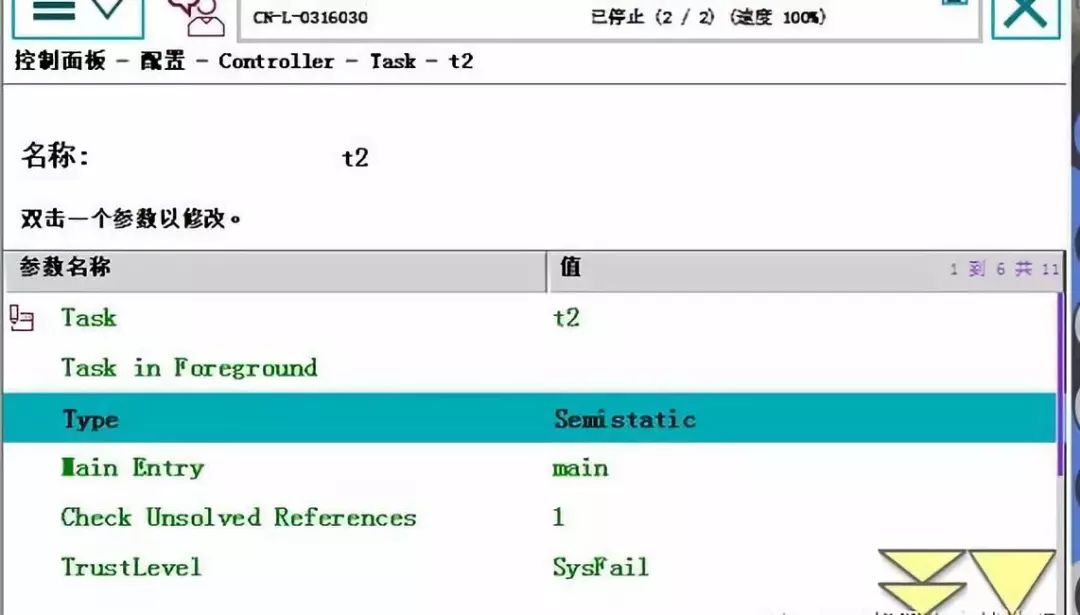
控制面板,配置
主题controller
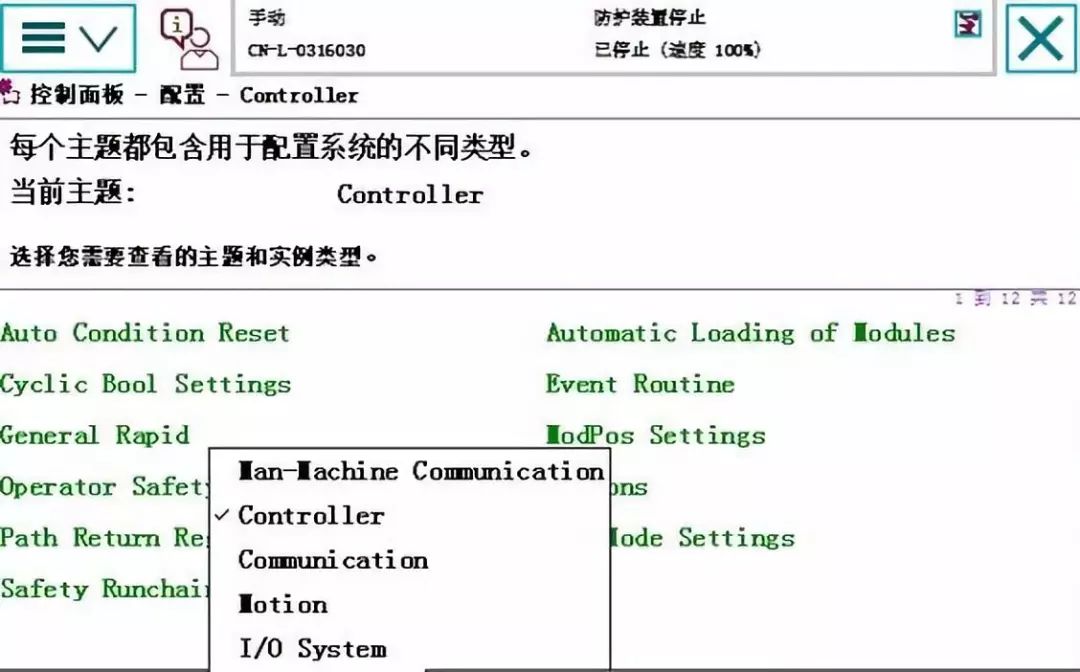
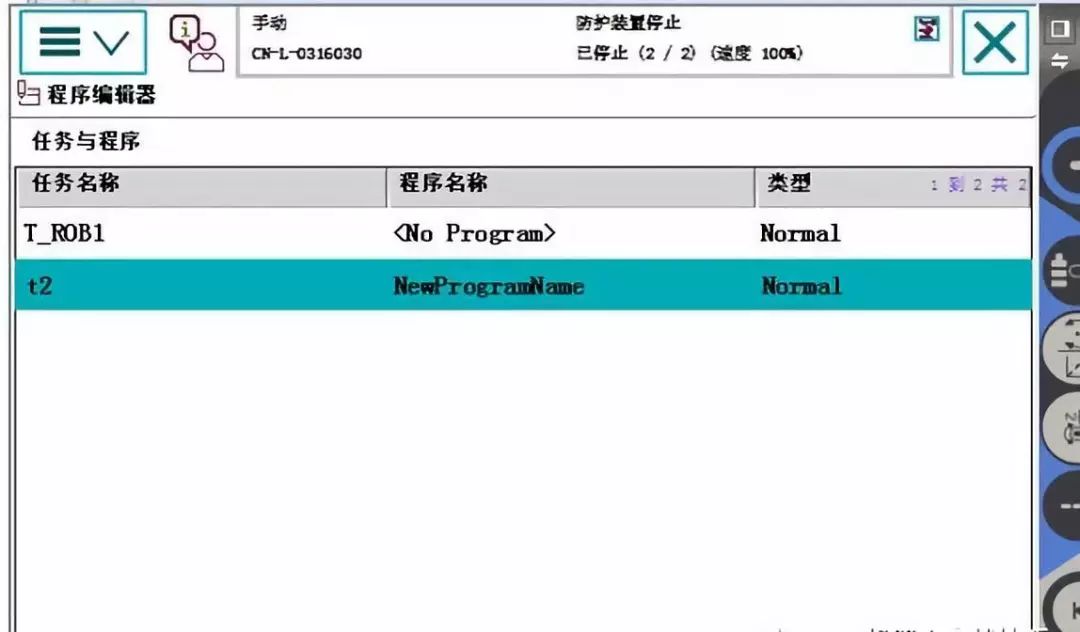
进入task,新建一个
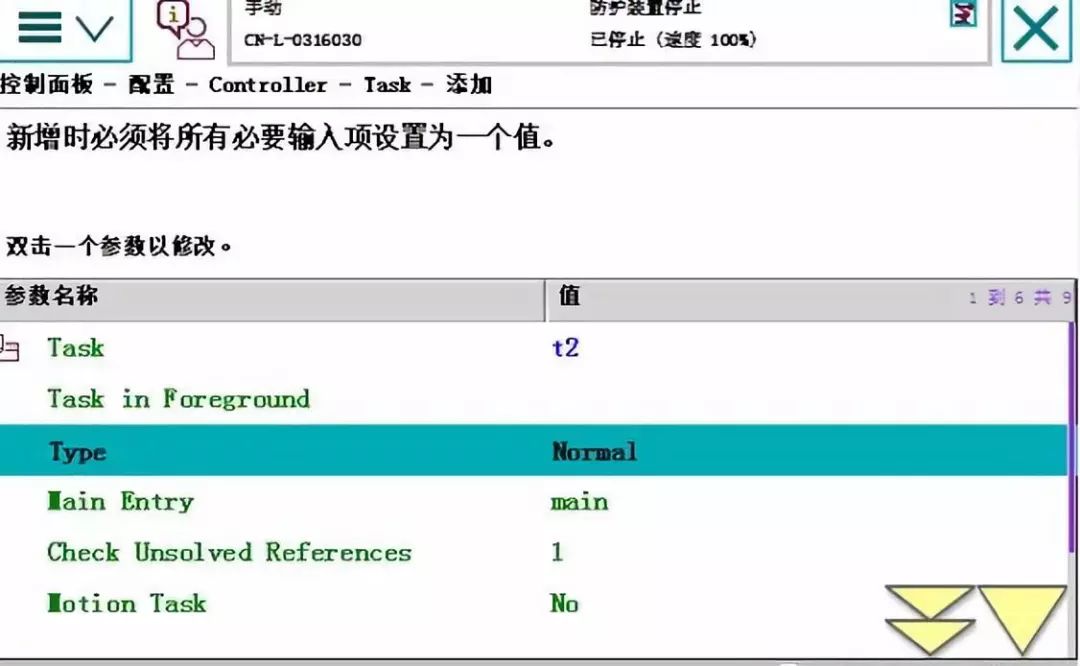
这个时候要设为normal,否则不能编程,全部编程调试好,再设回semi static就可以开机自动运行了。
重启
程序编辑器 进入t2 task。
如何多任务间传输数据?以下以任务间传输bool量flag1为例(即任何一个任务修改了flag1值,另一个任务flag1值也修改)
前台和后台都要建数据,存储类型必须是可变量,类型一样,名字一样,比如:
Pers bool flag1
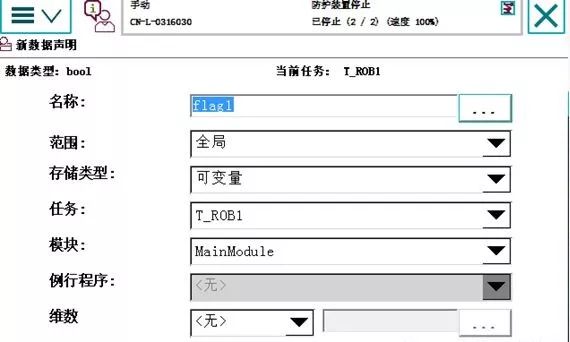
也就是2个任务里 必须都有这个flag1,而且必须是可变量。
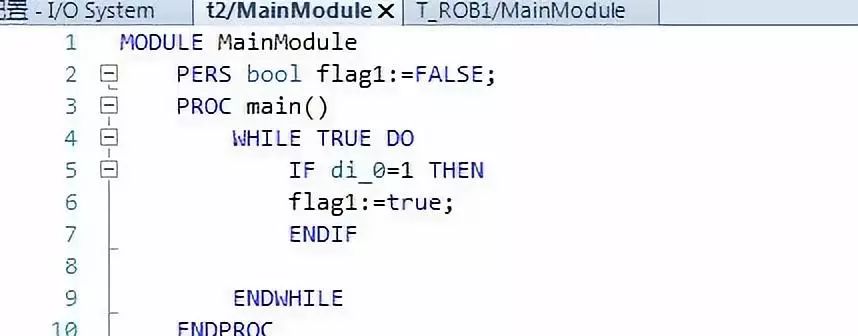
在t2里,代码如下
前台任务代码如下
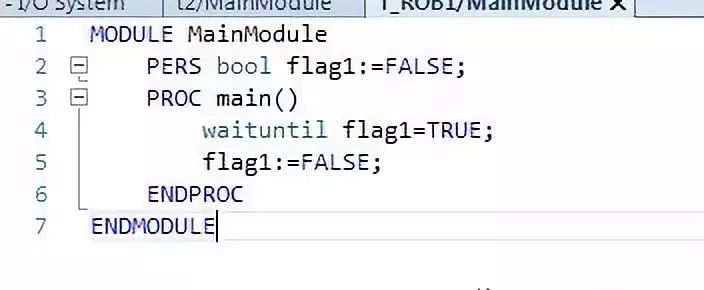
以上就能实现后台任务实时扫描di_0信号,如果di_0信号变1,flag1即为true。前台根据逻辑,一直等待flag1为true。执行过waituntil后,把flag1置false
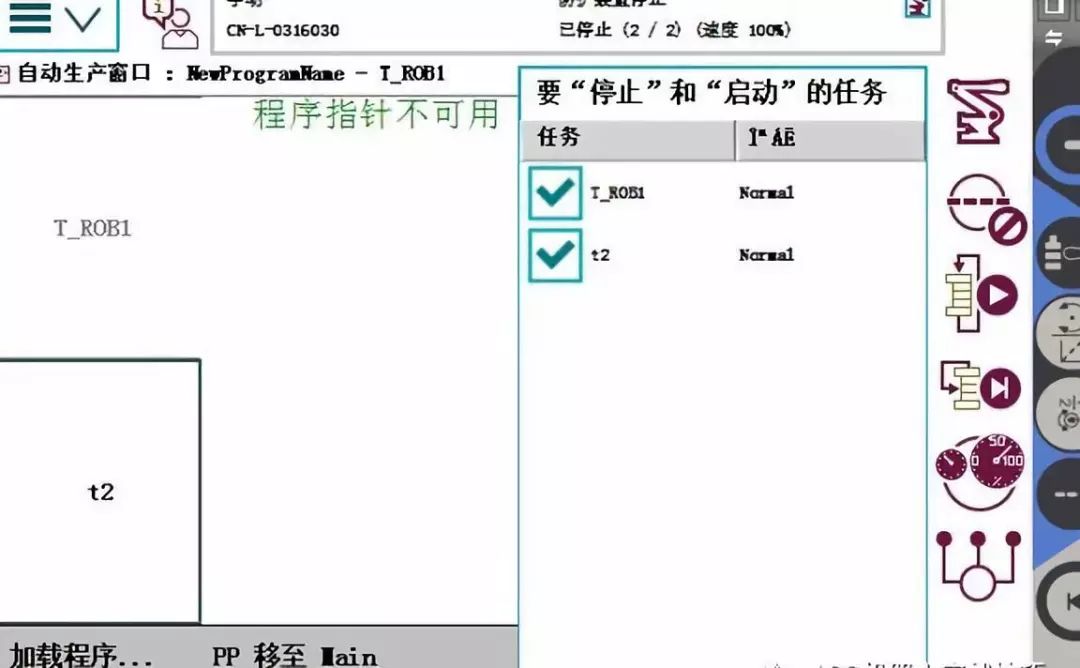
如何运行?
示教器右下角最下面一个点开,确保2个任务都勾上,然后运行,可以测试一下
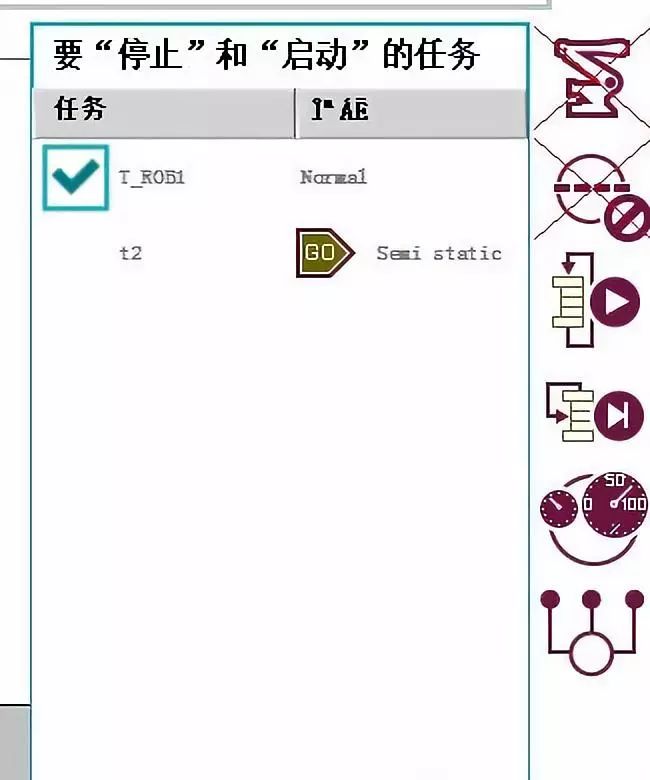
测试没问题,进入配置界面,把t2 改为semi static,重启,这个时候t2不能选了,已经开机自动运行了。
回复本条
-




![[爱你]](http://src.gongkong.com/website/bbs/layui/images/face/11.gif)
![[失望]](http://src.gongkong.com/website/bbs/layui/images/face/35.gif)
![[睡]](http://src.gongkong.com/website/bbs/layui/images/face/33.gif) 哈哈
哈哈
热门招聘
相关主题
- 大工计控的PLC,玩起来挺不错...
 [998]
[998] - 小型四轴机器人DENSOLPH四轴...[1119]
- 今天去了南京名爵,发现因为宝...[1129]
- 帮忙讨论下:这个机器人搬运项...[1173]
- 如何调整伺服参数[797]
- 6轴机器人的问题[2292]
- 自动包装码垛线,并联机器人高...[956]
- 丰田工机的PLC,大家参看图片...[7288]
- 机器人精华帖整理汇总!(1603...[6560]
- ABB机器人与欧姆龙plc通讯求...[1324]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
