正交编码器是什么,正交编码器工作原理如何确定? 点击:1527 | 回复:0

有许多具有操作原理的不同编码器类型。然而,信号交互的主要原理仍然非常相似。让我们以光学正交编码器为例来考虑脉冲的出现。
一、正交编码器信号
旋转传感器有一个连接在轴上的圆盘(轮)。它们的特殊标记位于接触区的表面上。这种标签是透明的,它们之间的磁盘表面是由不可穿透的材料制成的。
在线性正交编码器的情况下,刻度代替测量盘。特殊阅读器(滑块)沿着它移动。主要工作原理保持不变。
光束形式的正交编码器脉冲来自光源,根据相反类型的表面(固体或不透明),落入或不落入接收器(检测器)。
正交增量编码器在此过程发生的磁盘上有两个单独的引脚。有传感通道,其作用类似于信号检测器。它们通常称为通道A和通道B。这些点具有单独的输入和接线。因此,该设备在某一特定时刻具有两个信号接收器。
增量测量也需要一个起点。因此,有一个Z通道显示起始(零)位置。
根据光线是照射到透明标记还是不透明表面,接收器会捕获或不捕获信号。这可以用图形表示为具有矩形形式的两个图表,也称为方波。
二、正交编码
旋转正交编码器是数字IC(集成电路),因此它使用二进制代码。方波显示处于高(1)和低(0)状态的数字信号。需要二进制代码来通过接口(例如USB)和协议传输数据以控制系统。我们已经在这里描述了主要的数据传输类型:并行与串行接口。
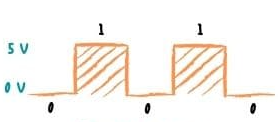
图为编码器在5V供电下的运行示意图。如您所见,线路显示为低0V(接地)和高5V状态。
三、位置和速度是如何确定的?
磁盘每转一圈的脉冲数取决于其表面上的标记数。这个原理是编码器分辨率的基本定义。因此,两个输出信号表征了特定时间的脉冲数。使用这些值,控制系统可以确定角速度、距离和加速度。
让我们解释图中的基本概念。首先,我们有一个循环的概念,它由360个电角度(标记为C)组成。字母P由脉冲宽度表示。这是脉冲在一个周期内达到最高点时的电度数。最后,我们案例中的相位是两条线的脉冲宽度中心之间的差异。
有时您可能会遇到带有通道(U、V、W)的图形。这些集成开关信号模拟霍尔传感器。这种特性对于用于无刷直流电机反馈的正交编码器很常见。
四、方向如何确定?
然而,轮子可以在两个方向上旋转。如何确定现在旋转的是什么?这很简单。这就是为什么你需要两个点和两条线而不是一条线。如您所见,两个引脚按顺序放置。
因此,当您同时查看两条图形线时,您会发现它们也略有偏移。输出通道A和B专门放置在磁盘上一定距离处,使它们在图形上的相位偏移90度。为便于计算,周期也分为4个相等的部分。在这些部分中的每一个中,图形都处于彼此独特的位置。
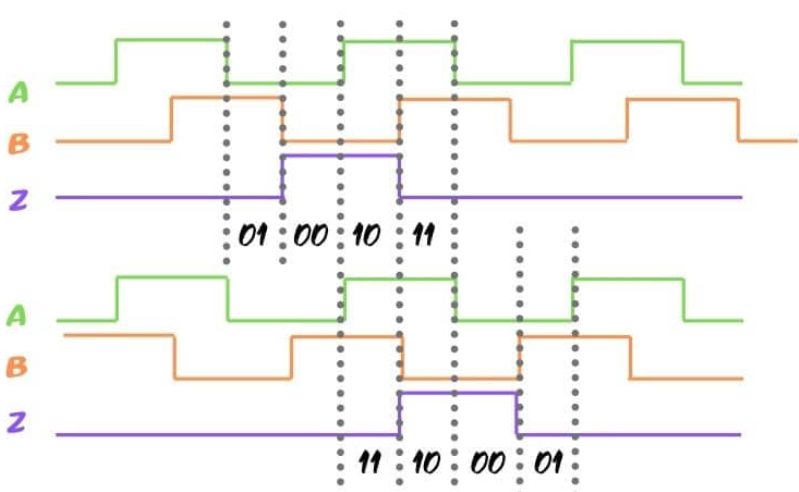
如果编码器向前(顺时针)移动,则A线位于最高点(1),通道B位于最低点(0)。我们得到了1和0的组合。下一个是11、00等。
如果我们从不同方向(逆时针)的同一点开始,我们会看到首先这条线将位于最高点(11),然后是以下组合:01,00等。
得益于正交编码器接口(QEI),通过比较每个周期中点的差异,我们得到了一个唯一的代码,指示接收数字组合的顺序。微控制器或位置计数器可以通过分析这些数据来确定光盘旋转的方向。解码后,这些信息进入控制系统或以通常的格式显示在显示器上。所提出的系统是最简单的系统之一。





楼主最近还看过
- (已结束)工控仪表擂台第二十...
 [664]
[664] - 电磁流量计的体积流量计算公...[714]
- 工控仪表擂台第九十四期-微量...[1816]
- 怎样使用万用表测量稳压二极...[1935]
- 压力变送器测量值波动较大是...[2512]
- 这样的仪表怎样做零点迁移[764]
- 热电偶在窑炉内安装的问题?[1387]
- 毫安毫伏级的电流电压用什么...[1095]
- 我曾经维修过的仪表(六)[1175]
- 谁能告诉我 pid是怎么一回事...[5406]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
