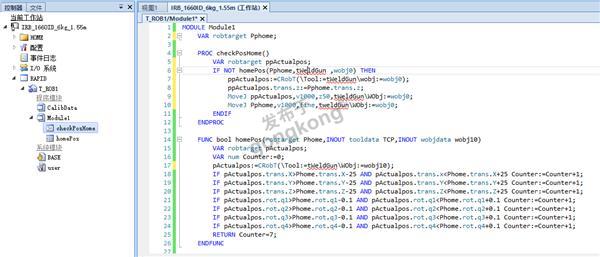
ABB机器人FUNC程序调用问题 点击:722 | 回复:2






楼主最近还看过

热门招聘
相关主题
- yamahaRCX340硬件接线
 [849]
[849] - 安川机器人拿掉示教器后怎么...[3730]
- 哪位大哥懂斯陶比尔机器人编...[3735]
- 如何知道ABB机器人工具实际的...[4274]
- 建议成立机器人机械手论坛[3364]
- 求购ABB机器人电机都是输出齿...[928]
- 工业机器人智能发展[1498]
- 不二越(那智)机器人,大家看一...[12560]
- 从入门到精通—keba机器人操作...[1165]
- 传说中的高性能带PLC+总线类...[811]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
