写的原点回归程序,求大佬解答 点击:585 | 回复:4






楼主最近还看过

 干嘛不用三菱内部回原点指令 而是用相对定位指令?
干嘛不用三菱内部回原点指令 而是用相对定位指令?
发表于:2021-03-16 13:51:47
2楼
"固囚囿团" 的回复,发表在1楼
对内容: 【有几点不清楚的地方:①楼主是要做先回原点,然后做两点之间的往复运动吗?②如是回原点干嘛不用三菱内部回原点指令 而是用相对定位指令?...】进行回复:
-------------------------------------------------------------
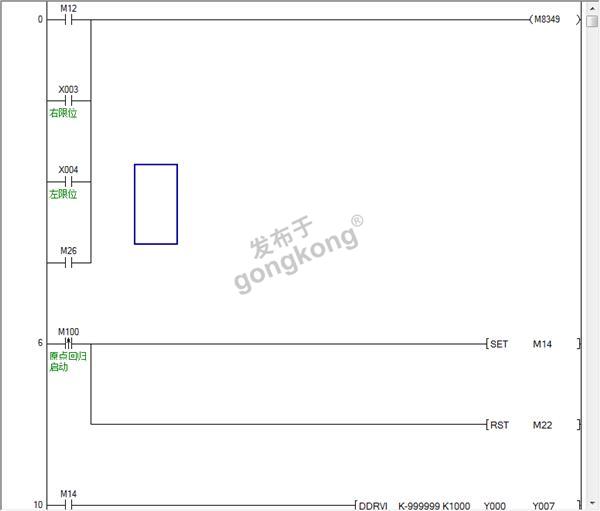
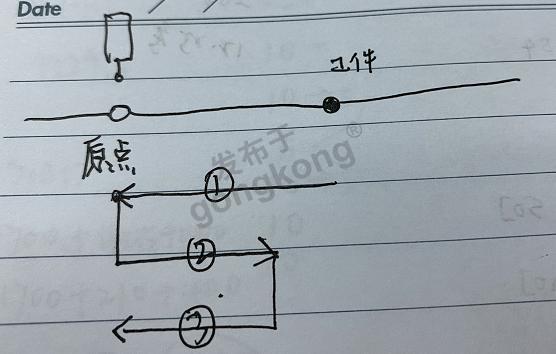
只是回原点。因为用的是微动开关,挡片是不能过去的那种,所以三菱内部的原点回归指令没办法用,所以只能是自己写一条原点回归指令。
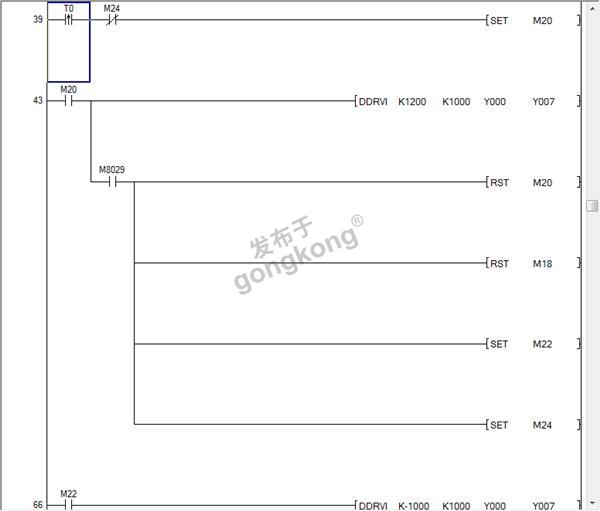
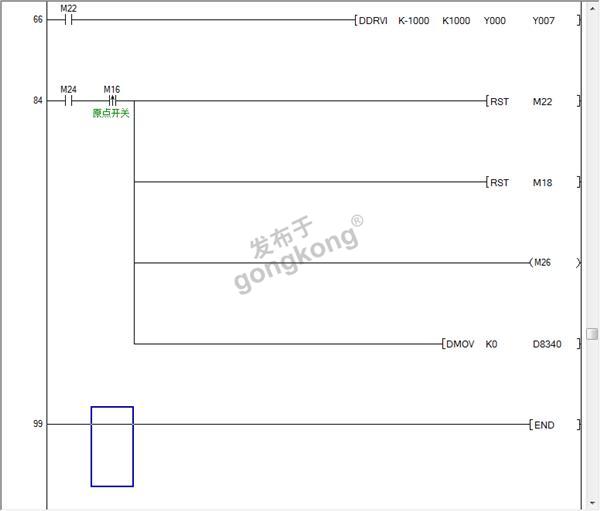
程序是这样的 假设工件在中间的话,那可以直接往左运动碰到限位(即把限位当成原点使用,设备要求的精度不高),但假设我现在的工件就是碰到了左限位,我还是要实现一次回原点的指令,设备就无法归零 所以为避免第二种情况发生,就采用了不管哪一种情况,都先让它碰到左限位后,再往右边走一段距离后再回到左限位归零
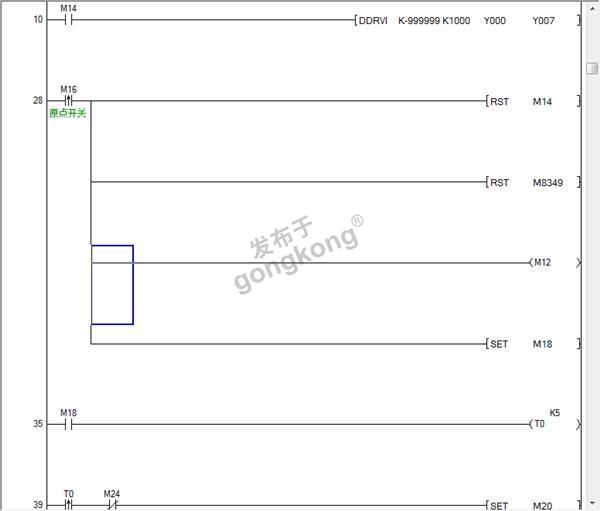
但是现在的问题就是启动M14工件碰到原点限位开关了,再按下M16却没反应了,D8340也无法清零。
好像也是可以用DZRN,强行把爬行的方向调转
感谢版主的意见。
热门招聘
相关主题
- 分享一个很好的PID学习资料 ...
 [9181]
[9181] - PLC时序图分析方法求助![9441]
- BMOV和FMOV有什么区别?[19455]
- 向您介绍一种专业电气绘图软...[14143]
- 电气图纸用什么软件画最好[14660]
- 两个OMRON CP1H的PLC经过串口...[10111]
- 请教STEP7 的仿真器PLCSIM如...[15762]
- PLC继电器输出是否直接驱动接...[15793]
- s7300打开一个程序时报错,显...[9730]
- 编程技巧展示:为一求助帖用S...[7174]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
