总线式控制驱动 点击:410 | 回复:1

步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,在非超载的情况下,电机的转速,停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。且步进电机其成本较伺服电机要低很多,在精度要求不高,速度要求一般(300r-500r/min)的场合下,得到广泛使用。
在小型自动化控制系统中,常常会有这样的困扰,小型PLC的脉冲输出口不够(三菱或欧姆龙系列一般带4个轴,松下最多6个轴),当想要驱动更多轴的时候,只能增加模块,增加成本。本文主要解决在小型PLC携带轴数有限的前提下,提供一种总线的方式,无须复杂的设置,通过网线(采用RS485通信)方式,驱动步进驱动器,实现步进电机的控制。
控制模式图(本文以松下FP-XHC60和研控总线式步进驱动器YKD2405PR-A1为例)
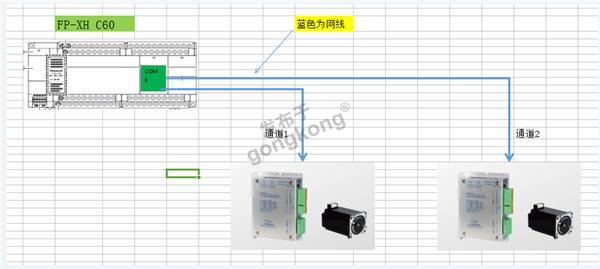
本例中PLC扩展COM6(双485)通信模块,连接两条总线,分别控制通道1,2的步进驱动器。值得注意的是,每条总线最多可搭载30个驱动器,通过拨码物理地址来区分不同驱动器。
网线接法:一端RJ45接口接驱动器MODBUS-RS485端口IN,另外一端棕色接COM6口正极,棕白色接COM6口负极
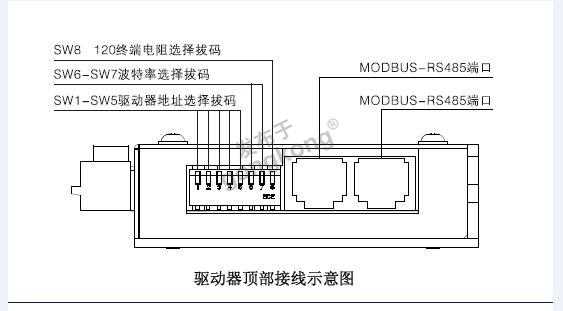
驱动器拨码:SW1,SW8拨ON,其余都是OFF

第一步,在PLC侧编写好电机控制程序(包括驱动器参数设置和电机控制交互方面),具体程序见附件;
第二步,连接好硬件,本例采用两条总线,双485分别控制两个通道的驱动器;
第三步,通过拨码开关,设置驱动器硬件地址;
第四步,设置通信参数,将PLC侧com1,com2口设置为Modbus通信模式,设置通信格式,设置通信速度,值得注意的是,如果你是第一次连接一个新的总线式驱动器,先将PLCcom1和com2口通信格式的奇偶校验改为无,等连接成功后,将相关驱动器参数由PLC写入驱动器完成后断电,再次更改PLC com1和com2口通信格式为奇校验;
第五步,PLC发送驱动信号,看电机是否正常工作。
 正在下载,请等待……
正在下载,请等待……







楼主最近还看过


- VB接收到PLC的十六进制码如何...
 [9239]
[9239] - 基恩士PLC编程软件(中文版)...[8885]
- 单按钮启停控制的21方法(附图...[10345]
- 一位老工程师收藏的3018套PL...[10713]
- 如何使PLC里的时间继电器复位...[7197]
- 求教:PLC运行灯不亮,一般会是...[19214]
- s7-200中的VD100里的数据怎么...[7508]
- 哪位有RS232转DH485接线图[13852]
- 工控老鬼 西门子S7200入门&精...[12814]
- 求助:OPC到底是什么东西[21244]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
