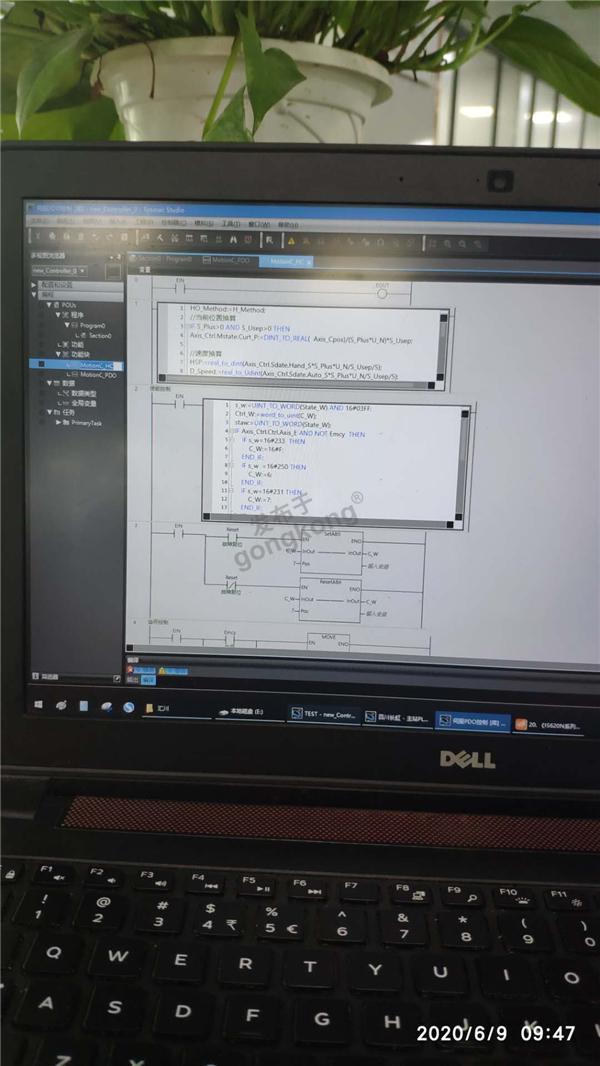
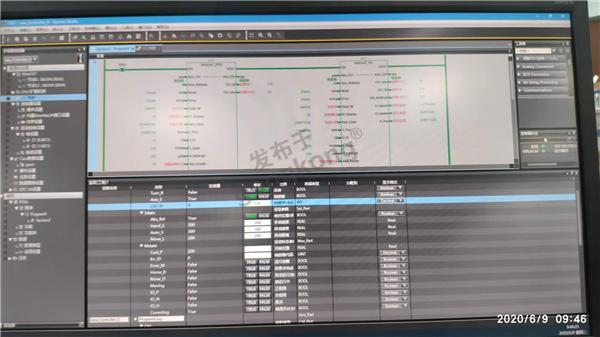
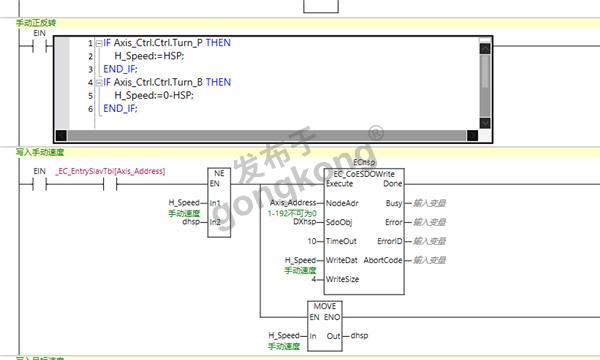
欧姆龙ECAT伺服通过PDO操作参数控制<此处内容被屏蔽>控制器轴限制 点击:9956 | 回复:85


 正在下载,请等待……
正在下载,请等待……
















热门招聘
相关主题
- 三菱触摸屏编辑仿真软件、三菱...
 [12139]
[12139] - PLC如何求模拟输入量在一段时...[10423]
- PLC控制变频器[8781]
- 三菱PLC仿真软件 GX Simulat...[10737]
- 仅有的一次面试被拒绝的经历...[10911]
- plc输入指示灯不亮 输出亮[7536]
- 如何通过internet对西门子S7...[9036]
- NPN与PNP传感器区别(转帖)--...[37892]
- PLC的COM口一般接正极还是负...[32950]
- 请大家使用我开发的软件PLC软...[16299]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
