FASTECHEzi-SERVOEtherCAT工业以太网通讯闭环步进电机9大特性 点击:342 | 回复:0

1. 基于EtherCAT 运动控制
Ezi-SERVO II EtherCAT 是使用EtherCAT 的步进电机控制系统。基于高速
其支持EtherCATCAN(CoE) 上的CAN应用层。CiA 402 驱动配置执行。

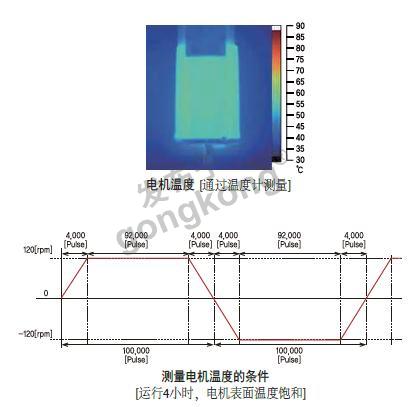
2. 依据负载控制电流
Ezi-SERVO II EtherCAT 自动根据负载来控制电流。使电机和驱动器
的发热率降至最低 ,这样也能节约能源。
3. 闭环系统
Ezi-SERVO II EtherCAT 是一种创新的闭环步进电机与控制器,利用安装
在马达后面的高分辨率编码器不断监测马达轴的位置。编码器反馈功能
允许Ezi-SERVO II EtherCAT每25微秒更新当前马达轴位置。允许Ezi-SERVO II
EtherCAT 驱动器可补偿位置损失,确保精确的定位。
例如,由于突然的负载变化,传统的步进电机和驱动器可能失去一个步
骤,产生定位错误。给最终用户带来很大的成本!

4. 提升电流 / 运行电流
通过设置提升电流参数可以提高加速/减速特性。
通过设置运行电流可以改善转矩。
5. 无增益调节
传统的伺服系统,为确保机器的性能,平滑度,位置误差及低伺服噪
声,需要调整伺服器的增益作为最初的关键步骤。即使系统采用自动
调整,系统安装后也需要手动调整,特别是多轴相互依赖时。
Ezi-SERVO II EtherCAT 结合步进电机特性,加上闭环运动控制算法的优
点,减少了传统闭环伺服系统增益调节的繁琐步骤。
这意味着Ezi-SERVO II EtherCAT针对应用进行了优化,并可立即使用!
Ezi-SERVO II EtherCAT 系统采用闭环步进电机控制的独特特性,消除了
这些繁琐的步骤,为工程师提供了高性能的伺服系统,而不会浪费安
装时间。 Ezi-SERVO II EtherCAT 特别适用于低刚度负载(例如,皮带
加了费用及安装的空间。
Ezi-SERVO II EtherCAT 即使在重载和高速情况下也表现异常!
以太网(100Mbps full-duplex)。Ezi-SERVO II EtherCAT 是EtherCAT 从模块。
支持配置位置,配置速度,复位等模式。
和皮带轮系统),传统伺服系统的惯量有时需要匹配齿轮箱,这样增
加了费用及安装的空间。
Ezi-SERVO II EtherCAT 即使在重载和高速情况下也表现异常!
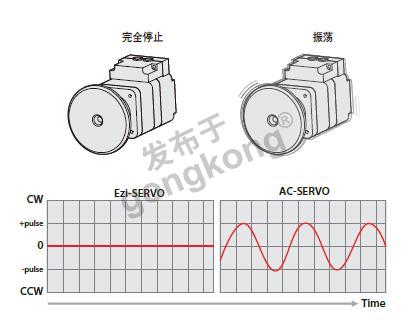
6. 无抖动
传统的伺服电机,当超出其位置时,驱动器会试着用相反的方向来纠正,
特别是在高增益的应用中,这种叫“空振现象”,在系统中是十分普遍
的,因为静止摩擦力明显高于运行摩擦力。其解决方案是降低增益,但
精度会受到影响。此时可使用Ezi-SERVO II EtherCAT 运动控制系统!
Ezi-SERVO II EtherCAT 利用步进电机独特的特性,并将自身锁定到所需的
目标位置,消除空振。此功能在纳米技术制造,半导体制造,视觉系
统和喷墨打印等应用中特别有用。
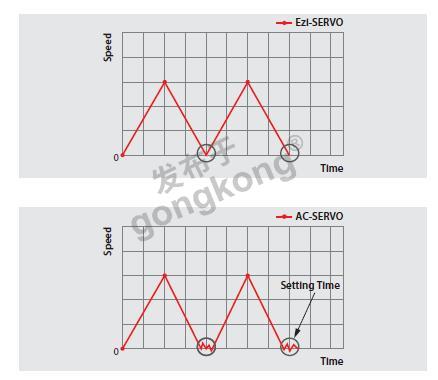
7. 快速响应
类似于传统的步进电机,Ezi-SERVO II EtherCAT可以与指令脉冲同步,
从而提供快速的位置响应。当需要低速度稳定性和短距离内的快速运
动时,Ezi-SERVO II EtherCAT 就是最佳选择。
传统的伺服电机系统,由于对当前位置的不断监测,在下条指令输入
信号与结果之间有自然的延迟。因此需要等待时间直到稳定,我们称
之为“整定时间(Setting Time)”。
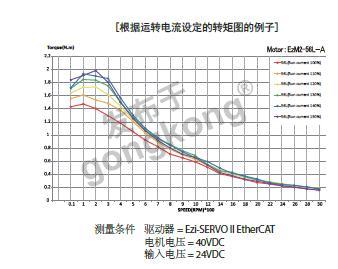
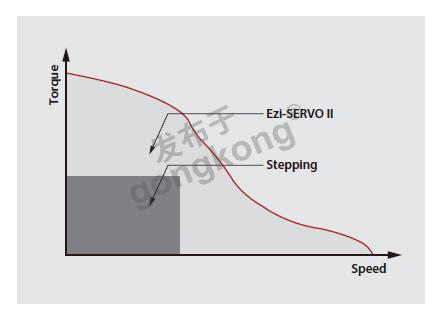
8. 高扭矩
与普通的步进电机和驱动器相比, Ezi-SERVO II EtherCAT 运动控制系
统可以在相当长的时间内保持高扭矩状态。这意味着 Ezi-SERVO II
EtherCAT 在100%的负载下连续运行而不会丢失位置。
与传统的微步进驱动器不同,Ezi-SERVO II EtherCAT由于其创新的最佳
电流相位控制,在高速运动期间利用持续的高转矩运行。
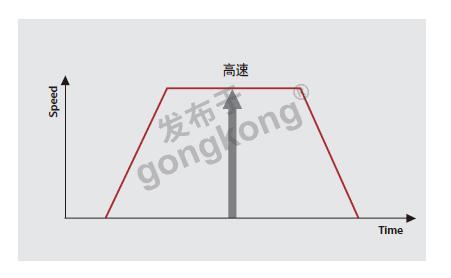
9. 高速度
Ezi-SERVO II EtherCAT 在高速运行时不会失去同步或定位误差。
Ezi-SERVO II EtherCAT连续监测当前位置的能力使得步进电机即使在
100%的负载条件下也能产生高转矩。
 正在下载,请等待……
正在下载,请等待……







楼主最近还看过
- 高速收放卷控制
 [11795]
[11795] - 再来讨论一下双伺服同步回零...[6843]
- 电机的速度响应频率是什么意...[6176]
- 请教老师西门子交流伺服电机...[5732]
- 请教伺服电机的刚性[9223]
- 松下A4伺服速度控制模式运动...[6681]
- 谈谈伺服电机速度的给定问题...[8669]
- 编码器一般接在驱动器上还是...[7294]
- 做运动控制卡,控制器之类的产...[5449]
- 步进与伺服学习笔记[11014]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
