RSLogix5000 编程软件中PIDE指令的使用 点击:4918 | 回复:1

RSLogix5000 编程软件中PIDE指令的使用
在RSLogix5000 V13.0以上编程软件版本中在FBD块中提供一指令PIDE,中文名称为增强型PID控制指令,采用速度增量算法,区别于传统梯形图指令PID(位置增量算法)。PIDE指令自带自整定功能,在PIDE指令手动模式下,可以通过自整定来确定P、I、D、参数,减少PID参数调节的时间,另外在自整定前,其PV类型可选(流量、压力、温度、位置等)。现将指令用法作一简要说明,以下所有图片均来源于测试工程截图。
创建一个工程,

图1:创建工程
Type:CPU型号
Revision:程序版本号
Name:工程名字
Description:工程描述
Chassis Type:机架类型
Slot:CPU所在机架槽号(机架槽号编号从0开始)
Create In:工程保存位置
1、 创建一周期性任务,如图2所示:
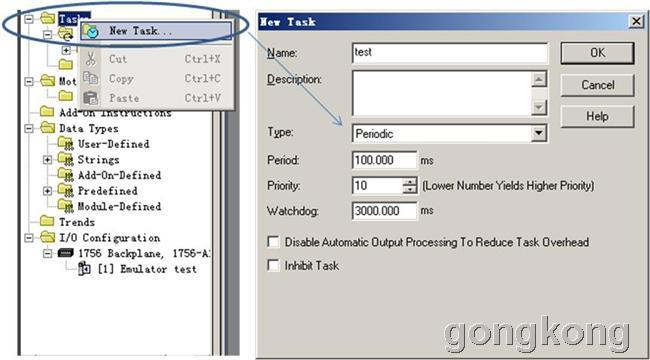
图2:创建周期性任务
Name:周期性任务名称
Description:周期性任务描述
Type: 任务类型(周期性/时间)
Period:任务周期时间
Priority:优先级(数值越小,优先级越高)
Watchdog:看门狗时间(任务周期时间的2~3倍)
1、 创建程序组,如图3所示:

图3:创建程序组
Name:程序组名称
Description:程序组描述
Schedule in:程序组所在任务
1、 创建程序段
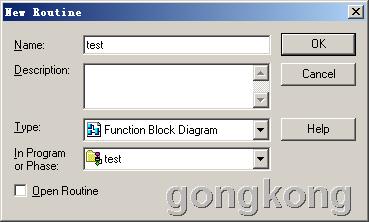
图4:创建程序段
Name:程序段名称
Description:程序段描述
Type:程序段类型(梯形图、功能块等)
In Program or Phase:程序段所在程序组
1、 打开程序段,添加PIDE指令,如图5所示:
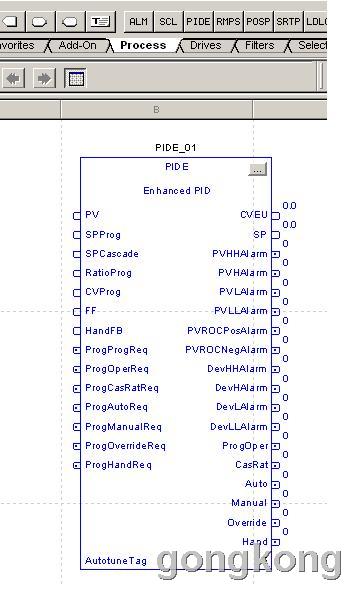
图5:添加PIDE指令
PIDE_01: 指令名称,添加指令时自动生产,可更改
Autotune Tag:自整定标签
1、 修改PIDE指令参数,使之符合使用要求,如图6所示:
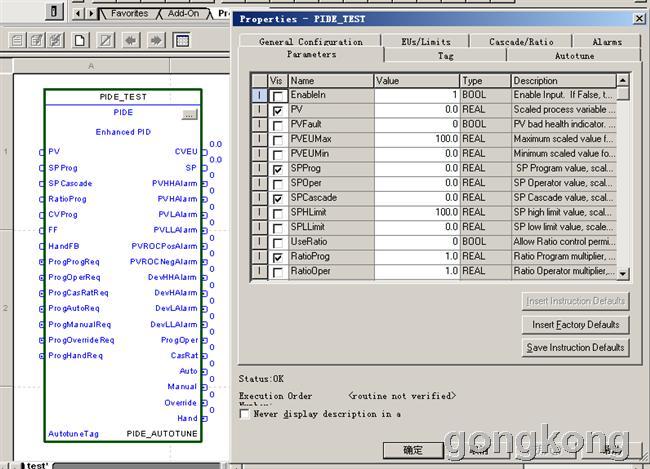
图6:PIDE参数设置
个人推荐使用的参数:
EnableIn:指令使能
PV:过程反馈变量,标度变换之后
PVEUMax:PV上限,标度变换之后
PVEUMin:PV下限,标度变换之后
SPCascade:SP远控设定值
SPHLimit:SP设定值上限
SPLLimit:SP设定值下限
CVInitReq:CVEU初始设定请求(1有效)
CVInitValue:CVEU初始设定值
CVInitReq和CVInitValue实现PIDE无冲击启动,相当于PID指令中的INHOLD和INHOLD VALUE
CVProg: CV手动输出值
CVEUMax:CVEU上限,最大值对应100%CV
CVEUMin:CVEU下限,最小值对应0%CV
CVHLimit:CV上限
CVLLimit:CV下限
PGain:P参数
IGain:I参数
DGain:D参数
AllowCasRat:远控允许
ProgProgReq:编程编程请求,手动到自动或者自动到手动切换时,需要置位此位
ProgCasRatReq:编程远控请求,编程到远控切换位
ProgManualReq:编程手动请求,编程到手动切换位
EnableOut:使能输出
CVEU:CVEU输出,最大值对应100%CV,最小值对应0%CV,远控/初始化请求有效模式下,CVEU作为PIDE调节的控制变量,相当于PID指令的CV
CV:CV输出,手动模式下,作为PIDE调节的控制变量,相当于PID指令的CV
SP:设定值,只显示
CasRat:远控模式显示
Manual:手动模式显示
以上参数设定完毕后,PIDE指令如图7所示:
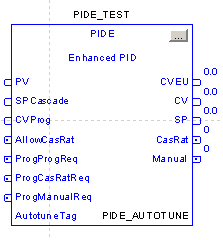
图7:调整参数后的PIDE指令
由于PIDE指令标签为结构体,因此需要更改的变量如CV上下限,P、I、D参数可通过梯形图对其赋值。
1、 连接调整参数后的PIDE指令的输入各管脚(也可用梯形图对需要的参数直接赋值),如图8所示:
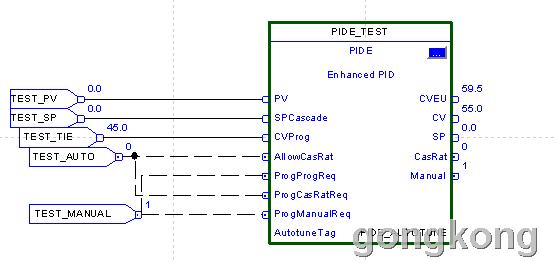
图8:PIDE指令输入管脚连接
2、 PIDE自整定
先让程序在线,点击PIDE指令,弹出如下窗口,如图9所示:
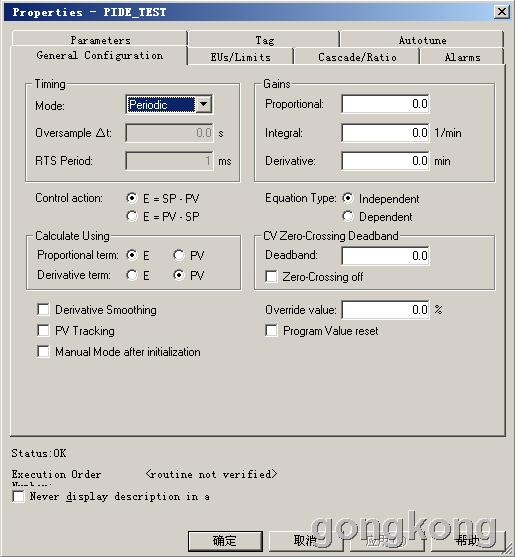
图9:PIDE指令属性栏里基本配置信息
Mode:PIDE指令执行模式(周期、实时、采样间隔时间等)
Oversample Δt:采样间隔时间
RTS Period:实时周期时间
Control action:误差类型 (SP-PV/PV-SP)
以上所有属性栏里信息全部可由参数设置,在低版本程序中只能由参数设定。
自整定过程如下:

程序在线,点击PIDE属性,弹出窗口中选择Autotune,然后点击Acquire Tag按钮,获取自整定标签,然后设置ProcessType(温度、流量、压力等),PV Change Limit (PV变化极限),CV Step Size (CV阶跃百分比,此值用于自整定时CV的阶跃值)。最后点击Autotune ,如下图: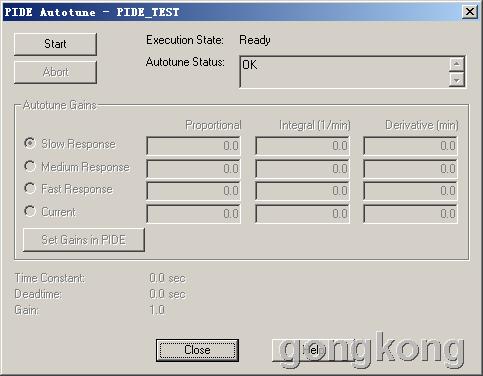
点击Start即开始自整定,整定结束,灰色部分便可选择,选择合适的PID参数,点击Set Gains in PIDE,把慢速、中速、快速响应PID参数写入PIDE指令。
小结:
经多次测试,除温度外,其余流量、压力等CV变化能立马引起PV变化的都可用此整定,另外在整定过程中必须确保CVEU加大时,PV值也同时变大,否则自整定会失败。





楼主最近还看过
- 三菱PLC中的指令[SFLP K1431...
 [16902]
[16902] - 免费提供LS(LG)PLC编程软件(...[17037]
- 接近开关与PLC问答[7285]
- PLC如何求模拟输入量在一段时...[10422]
- 继电器输出型PLC,驱动一交流...[8103]
- plc接受接近开关信号,用二线...[14765]
- 求教:PLC运行灯不亮,一般会是...[19214]
- S7-200模拟量问题的解答[17571]
- SETP7 里面的 L DBD [AR1,P...[7262]
- 可编程控制器基础知识[12175]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
