疆鸿智能MODBUS TCP转PROFIBUS解码智能包装生产线高效协同的密钥 点击:46 | 回复:1

疆鸿智能MODBUS TCP转PROFIBUS解码智能包装生产线高效协同的密钥
项目背景
在化工产品智能包装生产线中,系统集成灌装、贴标、喷码、封箱及打包等多道工序,实现从原料到成品的全流程自动化。此类生产线对通信可靠性、实时性及异构设备协同能力要求极高,其中库卡机器人(基于iiQKA.OS2系统)作为柔性执行单元,通常采用PROFIBUS-DP协议,而上位监控系统则普遍基于MODBUS TCP/IP协议。两种协议的直接互联存在技术障碍,亟需专业的协议转换解决方案。
网关的核心作用
工业网关在此场景中承担着“协议翻译器”与“数据路由器”的双重角色。具体而言,网关通过MODBUS TCP从站接口接收上位机的生产指令与参数设置,同时以PROFIBUS主站身份向库卡机器人下发动作指令并采集运行状态。这种架构有效隔离了不同网络协议的差异,确保实时控制数据与监控信息在异构系统间无缝流动,为生产线的集中监控与分布式控制提供了技术基础。

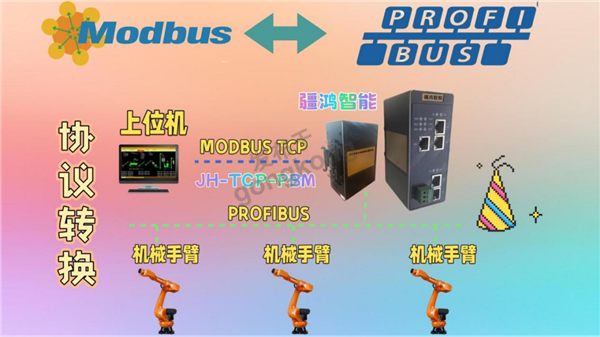
系统拓扑与网关部署
在典型的智能包装生产线网络拓扑中,网关处于承上启下的关键位置:
- 上层网络:网关作为MODBUS TCP从站,通过工业以太网接入车间级监控网络,接收来自SCADA/MES系统的指令
- 下层网络:网关作为PROFIBUS主站,通过屏蔽双绞线连接库卡机器人控制器(从站),构成实时控制环网
- 安全协同:网关配合动态安全区系统,实时传输机器人运行状态至安全控制器,实现人机协作的安全管理
此种部署方式既满足了上位系统对生产线全局可视化的需求,又保证了机器人控制的实时性与确定性。
数据映射规划
协议转换的核心在于数据点的精确映射。在本项目中,需规划双向数据交换:
1. 下行映射(控制流):
- MODBUS保持寄存器(4xxxx)映射至PROFIBUS输出模块
- 包装规格参数、灌装量设定值转换为机器人运动轨迹参数
- 启停指令、模式选择等逻辑信号对应PROFIBUS控制字
2. 上行映射(状态流):
- PROFIBUS输入模块状态映射至MODBUS输入寄存器(3xxxx)
- 机器人实时位置、故障代码转换为可读状态信息
- 视觉检测结果(如标签位置偏差)通过网关反馈至上位系统
映射表需详细定义每个数据点的地址、数据类型、刷新周期及异常处理机制,这是确保系统稳定运行的关键文档。
总结
在智能包装自动化系统中,疆鸿智能MODBUS TCP转PROFIBUS网关已超越简单的协议转换功能,成为实现信息技术(IT)与操作技术(OT)融合的关键枢纽。它既保障了库卡机器人控制的毫秒级响应需求,又满足了上位系统对生产数据采集的开放性要求。通过精心设计的数据映射与稳定的硬件性能,此类网关显著提升了生产线的协同效率与可靠性,为化工行业智能化升级提供了可复用的通信架构解决方案。随着工业互联网的深化,智能网关的角色将进一步向边缘计算节点演进,在本地数据预处理、安全策略执行等方面发挥更大价值。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
