运动控制器的轴参数设置—UNITS--脉冲当量 点击:2616 | 回复:2

在运动控制装置中,当机械结构确定以后,电机和机械装置的传动关系也就固定了,电机每转一圈产生的机械位移量也就固定了。脉冲当量UNITS是每单位对应的脉冲数,可以是单位距离、单位角度等,支持5位小数精度。
控制器以UNITS作为基本单位,运动的目标位置、速度、加减速度等都是以UNITS作为基础单位来进行运算执行,UNITS修改后,目标位置、速度、加减速度等会随UNITS改变成比例变化。
语法:UNITS=变量或UNITS (轴号)=变量
例子:UNITS=10000
常见的几种机械传动的UNITS参考计算方式见下表。
机械结构 | 图例 | 机械规格 | 编码器分辨率 | UNITS设置参考 |
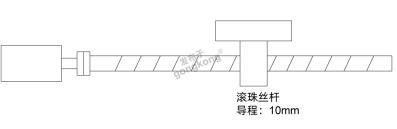
滚珠丝杆 |
| 滚珠丝杆导程:10mm 减速比:1/1 | 1圈脉冲数:10000 | 脉冲数/丝杆导程:10000/10 |
圆台 |
| 1圈旋转角度:360 减速比:1/5 | 1圈脉冲数:10000 | 脉冲数/角度:5*10000/360 |
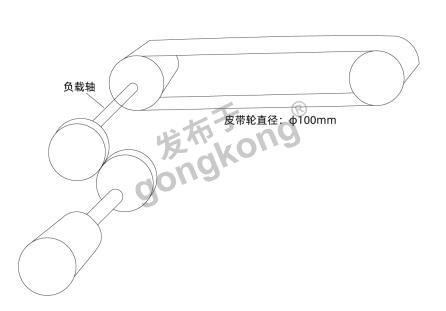
皮带+皮带轮 |
| 皮带轮直径:100mm 皮带轮周长:314mm 减速比:1/1 | 1圈脉冲数:10000 | 脉冲数/周长:10000/314 |

如设置脉冲当量为1000,速度SPEED以设置的脉冲当量为单位,则每秒按照当前设置速度值*1000进行发送脉冲给执行机构。
此时若直线运动指令的距离参数写2,则发送2*1000个脉冲,2000个脉冲能让电机转多少角度,需要参考电机的一圈脉冲数(电机转动一圈需要的脉冲数量)的设置,若电机的一圈脉冲数为10000,则2000个脉冲能让电机转72°,这样运动指令的实际运动距离就能被换算出来了。
以上为脉冲当量UNITS的设置方法,总而言之,设置前先要查出电机的一圈脉冲数,再结合机械结构的特点进行设置。
一般而言,步进电机的一圈脉冲数较小,伺服电机的一圈脉冲数较大,需要十万或百万级的脉冲数才能驱动电机转一圈,故伺服的精度较高,相对于的成本也高一些。





楼主最近还看过

- 伺服驱动器出来的编码器信号...
 [8539]
[8539] - 如何确定伺服的加速和减速时...[6265]
- 求助“分度盘工作原理”?[6127]
- 伺服电机的累积误差,怎么消除...[22239]
- 三菱的伺服用于转矩控制模式...[6043]
- 线数和分辨率[8853]
- 步进电机转矩与细分的关系[11409]
- 请问:松下伺服驱动器的差分脉...[12855]
- 好书共赏!向大家推荐3本业内...[6081]
- 求助:大电流步进电机驱动[6706]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
