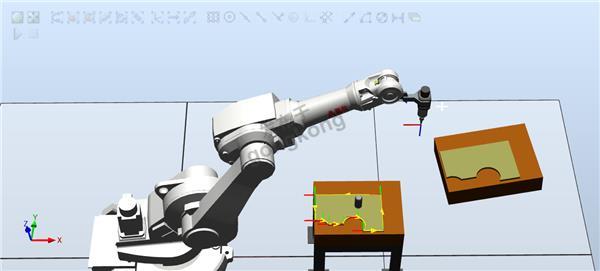
Robotstudio仿真实现ABB机器人工件坐标系转换 点击:1003 | 回复:2






楼主最近还看过

热门招聘
相关主题
- abb机器人示教器手动不上电
 [1568]
[1568] - ABB拆剁仿真[1387]
- 主板电池是直接焊接引线的的...[4149]
- 关于roboguide的许可文件损坏...[2507]
- abb机器人资料[6182]
- 求一套库卡码垛的程序[3680]
- 如何避免ABB焊接机器人管线包...[2588]
- ABB机器人视频教程二[1141]
- 请问哪位有SANKYO ROBOT SC3...[5116]
- RobotStudio[1122]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
