管道检测RVI设备的组成及技术参数 点击:74 | 回复:0

很多时候因为无法靠近或者安全考量,我们需要远距离目视检测,也就是RVI。常用的仪器设备有:电子视频内窥镜、远程视频遥摄监控PTZ系列、无人机、爬行机器人等等。对于管道内部结构及缺陷检测这种应用需求,由于管道通常比较长,仅凭人眼是难以看得很远,这种情况下的全面检测同样需要RVI检测技术的助力,可以选用爬行机器人这种管道检测RVI设备。

为什么选择爬行机器人?主要取决于需求和产品自身特点。前面提到的电子视频内窥镜大都是针对狭小紧凑空间设计的,探头线或插入管基本是毫米级的,长度也多在1m-10m,因此对于大口径深邃管道检测来说,并不适用。而同属工业内窥镜家族的爬行机器人则具有不同的特点,线缆有数百米长,照明功率更高、擅长为空旷空间提供充足照明,因此对于大口径深邃管道检测来说,爬行机器人更为适用。
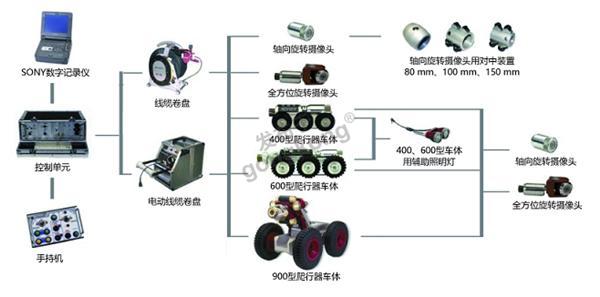
管道检测RVI设备的组成:爬行机器人由控制单元、线缆卷盘、爬行器车体、摄像头、照明装置等几部分组成,其中摄像头和照明装置设置在小车上,负责跟随小车进入管道后照明并捕获影像,控制单元则是小车和操作者之间的交互接口,可以通过手持机操控小车的转向、速度、和照明亮度,也可以接收小车回传的检测影像。因此,爬行机器人的技术参数也是由这几部分组成的。
下面以ROVVER400为例,为您介绍管道检测RVI设备的主要技术参数:
1. 摄像头参数
规格:1/2″彩色CCD
镜头:4mm、f1.2、焦距可调
视野:68°×90°×100°
焦距:6mm~无限远
尺寸:φ48mm×78mm(轴向摄像头)、φ88mm×192mm(全景摄像头)
2. 车体参数
长度:247mm(安装轴向摄像头时)、339mm(安装全景摄像头时)
宽度:94mm
高度:80mm
重量:4.5kg
材料:镀镍铜质、不锈钢、铝
驱动:2个20W直流电动机、6轮驱动、方向/速度可调
耐压:1bar---相当于10米水深
车轮:φ64mm车轮6个(适用100mm内径管道),φ86mm车轮4个(适用150mm内径管道),φ86mm宽体车轮4个(适用175mm内径管道)
3. 照明参数
摄像头端:10W、16个0.6W卤素灯
车体端:40W、2个20W卤素灯
辅助灯:40W、2个20W双基色聚光灯
最大功率:90W
作为管道检测RVI设备,爬行机器人不仅可以代替检测者进入管道深处,而且可以利用摄像头捕获并传回管道内的影像,还具有灵活的转弯、翻越障碍等能力,能够应对管道内的各种环境状况,此外还具有异物抓取能力。选择爬行机器人,需要根据管道情况以及参考车体、车轮和摄像头尺寸等参数,选择相应的型号,以便能够顺利地完成检测任务。





楼主最近还看过
- 变频器干扰仪表 求助
 [473]
[473] - 仪表安全等级SIL1、SIL2与SIL...[768]
- CO传感器原理[958]
- 电接点水位计常见故障处理方...[707]
- UJ33D-2电位差计怎么测定热电...[1644]
- 今晚干活维修了一气动阀[1342]
- 控制液体的流量有哪几种方法...[2197]
- 又被科隆这家坑了[1238]
- 化验室中玻璃仪器的清洗方法[1088]
- 如何使用万用表检测双向晶闸...[806]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
