移通创联CANopen转Profinet网关连伺服驱动器RoboteQ的配置方法 点击:328 | 回复:0

发表于:2021-10-26 17:32:15
楼主
移通创联CANopen转Profinet网关连伺服驱动器RoboteQ的配置方法
客户需求为使用canopen转profinet网关将伺服驱动器RoboteQ驱动器数据接入西门子PLC之中,使用设备为西门子PLC一台(支持profinet协议) 移通创联CANopen转Profinet网关YT-PN-02一台,RoboteQ驱动器一台。
移通创联CANopen转Profinet网关YT-PN-02分为两部分配置:一部分为西门子编程软件博图上面的数据配置,另一部分的配置是canopen网关配置工具上的数据配置。
下面是canopen网关配置工具上的数据配置步骤:
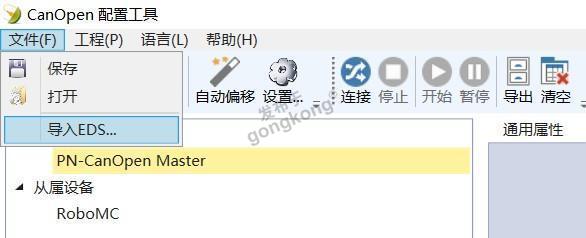
6. 配置canopen转profinet网关YT-PN-02参数
先导入eds文件
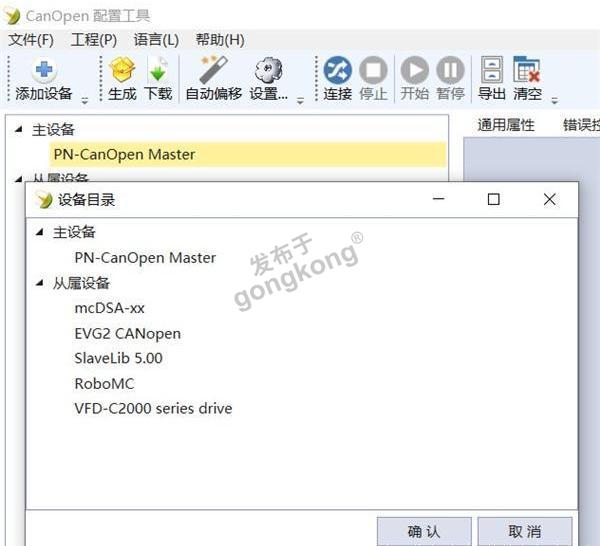
7. 添加canopen主从设备(本例从站ID为3)
8. 设置主站参数波特率和从站保持一致,本例为125K

9. 设置网关IP地址和设备名称(需要和博图组态中保持一致)

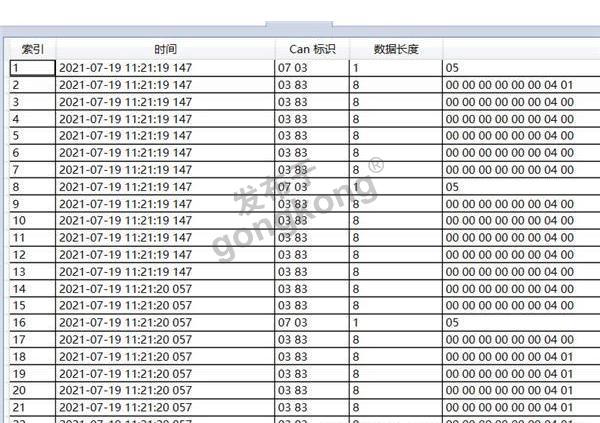
10. 配置从站参数
如配置心跳到TPDO2,ID为383

11. 点击生成下载
12. 将网关重新上电,将自动接入西门子网络。
13. 监控对应地址(此参数大小为四个字节)通道偏移设为0的时候数据将映射到PLC的ID68并依此往后排列。

至此移通创联CANopen转Profinet网关YT-PN-02连伺服驱动器RoboteQ的配置已经完成。





楼主最近还看过
热门招聘
相关主题
- I2c总线对电容的上限要求是多...
 [1418]
[1418] - 现场总线的难题[1983]
- LonWorks: Enabling the Net...[1372]
- 发展现场总线技术提高我国过...[1878]
- 求助:WAGO750-870/750-833 以...[5659]
- 精华讨论帖 说说RS485接线那...[3776]
- 请教关于MCP2510的问题[1662]
- 求助:怎样从正常通讯的RS232...[2378]
- 基金会现场总线在大型项目中...[1507]
- 请教TP170A的组态问题,急~!...[1356]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
