分享2D机器人视觉应用案例 点击:974 | 回复:4

发表于:2020-10-30 15:07:28
楼主
2D机器人视觉应用
机器人2D视觉引导系统是一套专门用于引导工业机器人精确抓取、放置、贴合的视觉系统.可为多种国内外品牌机器人提供视觉引导系统解决方案
功能介绍:
识别和确定目标物位置,引导机械手进行准确的拾取;高精度的定位,引导机械手进行精确对位。
操作简单;
保持高精度和重复精度;
自动寻找特征;
精准放置到装配和加工位置;
机器人手臂安装相机和固定安装相机两种方式
与YAMAHA机器人运控相结合,无需第三方机械手软件即可实
现机械手轨迹示教、路径规划、通讯测试,视觉直接控制
YAMAHA机器人运行

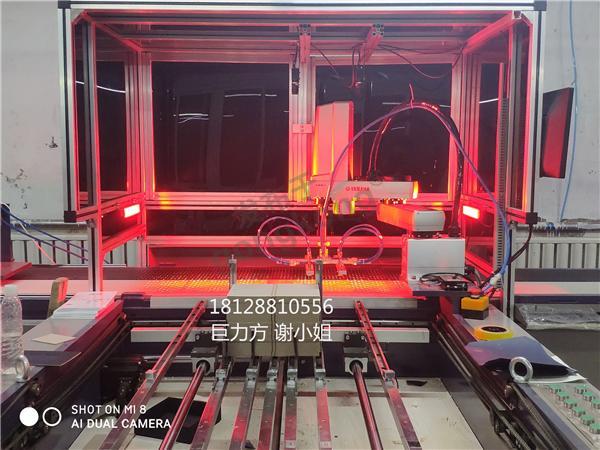
应用案例-1:
视觉引导机器人-天地盖定位贴合视觉系统
检测内容:1、识别传送带上面纸的位置角度,计算与基准坐标的偏移量。
2、将偏移量发送给机械手,机械手根据偏移量抓取纸壳完成贴合。
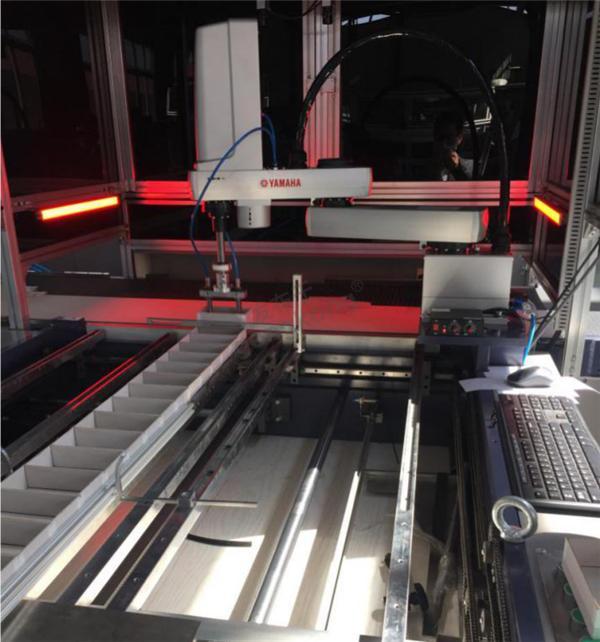
应用案例-2:
视觉引导机器人-定位抓取摆放PCB板
从入料处放入空料盘,当料盘到达机器人取料位置后,会通知
机器人,然后机器人会将治具中检测完的料,依次放入料盘,然
后流到 FCT 工位进行检测操作
◇ 系统构成:
▪ 相机:2个
▪ 像素:1000w
▪ 精度:±0.03mm
▪ 机器人:单臂6轴

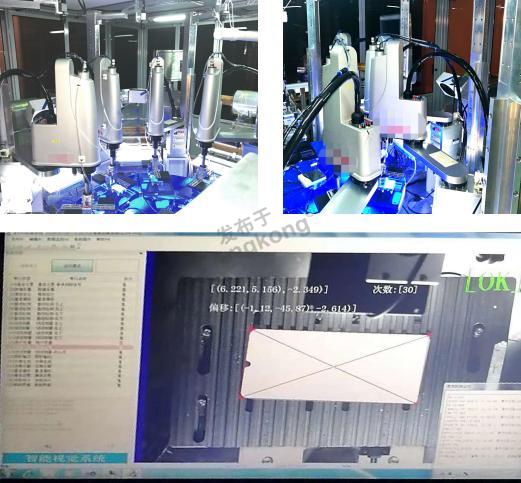
应用案例-3:
视觉引导机器人-定位贴合背光源
本系统四个工位每个工位采用5个相机定位产品的角边,背光源照亮产品,依次检测膜材和半成品的位置,进行精确定位,根据产品位置的变化,计算出偏移量,将偏移量传送给机械臂(YAMAHA),移动校正,实现贴合.
1分不嫌少!
赏





楼主最近还看过


热门招聘
相关主题
- 英威滕CHE通讯端子问题
 [915]
[915] - 求助 基恩士视觉系统用的什么...[6579]
- 机器视觉技术太阳能光伏硅片...[1087]
- 求助:产品检查问题?[1033]
- 寻mcgs www的狗[1046]
- 求YAMAHA机械手中文资料请进[2470]
- LVDS 到CameraLink信号转换器...[923]
- 机器视觉定位产品[1173]
- 二值化起什么作用[2012]
- 正版 Cognex VPRO-MAX-U[1197]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
