编程设置工件坐标系 点击:2123 | 回复:14

发表于:2020-06-20 11:53:11
楼主
100分-未结帖
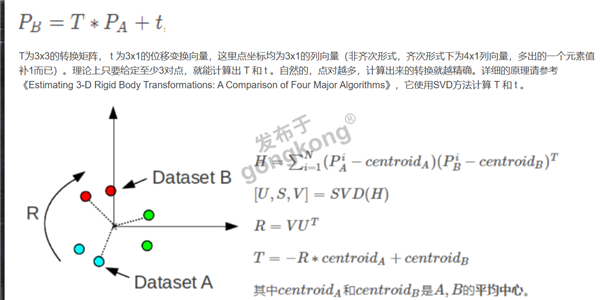
A坐标系是机器人基坐标系,B坐标系是工件坐标系,A坐标系有7个点A1、A2、A3、A4、A5、A6、A7(即移动机器人在不同位置时同一个TCP的坐标值)。B坐标系中有三个平面分别为Mx平行于YZ轴,X轴上偏移量为Bx;My平行于XZ轴,Y轴上偏移量为By;Mz平行于XY轴,Z轴上偏移量为Bz。点A1,A2,A3在平面Mx上且不在一条直线上;点A4、A5、A6在平面Mz上且不在一条直线上;点A7在My平面上。怎么编程求B坐标系相对于A坐标系的位姿。
请教各位大侠,非常感谢!!!!
我是大大的菜鸟,勿拍砖!!!!再次感谢!!!有偿哦
1分不嫌少!
赏





楼主最近还看过



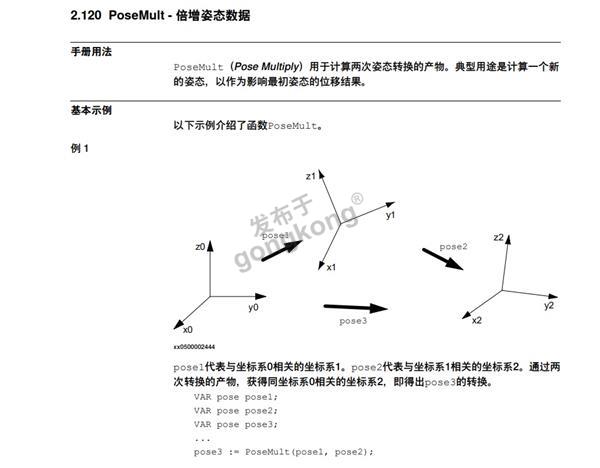 参照一下这个指令。
参照一下这个指令。
热门招聘
相关主题
- ABB机器人保养实录
 [6244]
[6244] - 安川机器人急停信号处理[1502]
- KUKA如何做外部自动选择程序[1164]
- ABB机器人PCinterface[942]
- 安川机器人拿掉示教器后怎么...[3730]
- 请教如何打开这个机器人模拟...[1068]
- 终于弄了一个好看一点的布局...[1979]
- 安川DX200机器人4328报警[4993]
- 教育部信息中心全国工业4.0与...[1023]
- 这个编号代表的意思[2196]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
