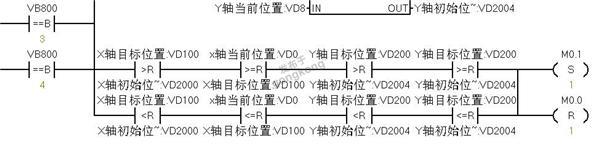
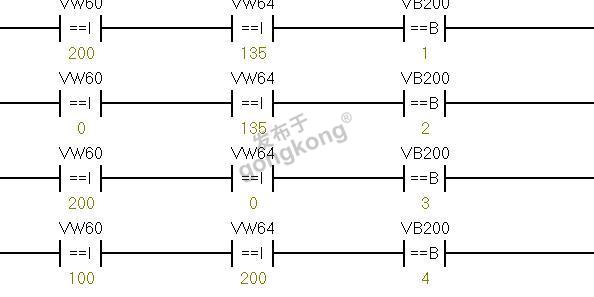
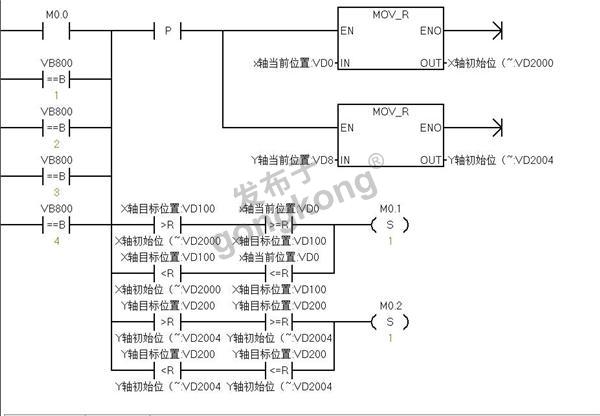
运动控制多点位置,如何在机械精度不高的情况下连接每一步 点击:285 | 回复:4






楼主最近还看过

热门招聘
相关主题
- 国产PLC即将出世
 [8035]
[8035] - 简单的编程,谁能试试?[10057]
- 请教:西门子S7-200如果被设置...[20309]
- 解读三菱程序[10929]
- 求一款简单的电气画图软件!!...[13407]
- PLC出现运行故障的常见原因及...[11614]
- (已结束)工控PLC擂台第3期--...[7622]
- 从零开始学plc[7692]
- 求助高手,施耐德PLC面板上的...[16519]
- 永宏PLC与电脑连接的编程线接...[11944]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
