EPSON机器人远程以太网控制和TCP/IP通讯测试 点击:2840 | 回复:1

发表于:2019-11-08 19:35:18
楼主
>机器人硬件配置:
机器人本体:G10-851S
机器人控制器:RC180
>远程以太网控制配置方法
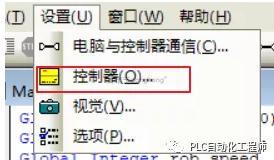
1、设置>控制器
2、在弹出的对话框选择如下,确定
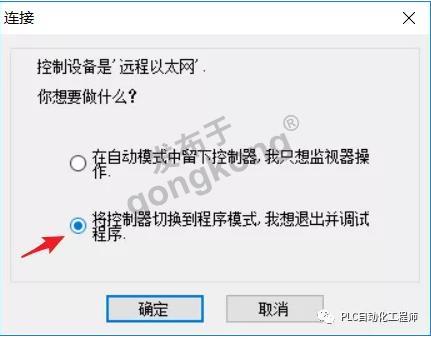
3、在弹出的 设置控制器页面,进入配置选项卡
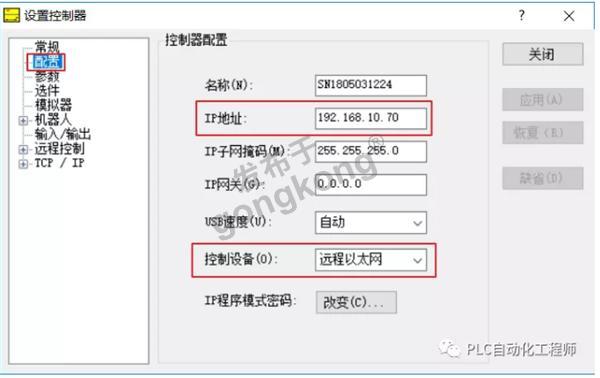
必要设置项:
1> IP地址:网段与PLC或者PC一致,ip不能重复
2> 控制设备:选择远程以太网
另外 IP程序模式密码:如果需要设置密码,点击改变按钮,设置密码,如果设置了密码,登陆时需要。
4、远程控制设置

设置项:
1> IP端口号
2> 终端:结束符
3> 超时:设成0s,即永远不会超时
另外 IP程序模式密码:如果需要设置密码,点击改变按钮,设置密码,如果设置了密码,登陆时需要。
以上是远程以太网控制配置方法,配置完成后,可以通过发生命令来控制机器人启动、停止、操作内部IO等,命令内容可以参阅系统手册,关于远程控制部分的内容。

>TCP/IP通讯配置方法
1、同样在上述 设置控制器页面选择 TCP/IP,展开
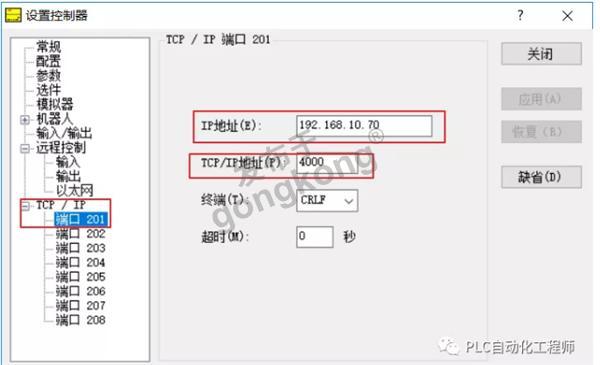
可支持个独立通道端口,按需使用。本例使用端口201,配置如上图所示
说明:
1>IP地址:机器人该端口作为服务器使用时,该IP地址是本机器人端口的ip,IP可以与远程以太网设置的一直。 作为客户端使用时,该IP要填写对方服务器的IP.
2>TCP/IP地址(P):端口号,按实际需要填写,不能与其他端口重复
3>终端:结束符
4>超时:设置成0s,永不超时
TCP/IP通讯,需要机器人运行起来后才能使用,执行相关通讯程序。可用于传递数据,坐标等。
1分不嫌少!
赏





热门招聘
相关主题
- 用STM32单片机实现PLC功能的...
 [8308]
[8308] - 国内某大型项目实录——西门子...[8341]
- 电气工程师工作经验总结[23696]
- (已结束)工控PLC擂台第2期--...[8999]
- STEP7 中文视频教程下载[14084]
- 请问在伺服运行电机时,速度老...[8277]
- 6台泵自动轮换问题[10636]
- 怎么找不到LG PLC官方网站?[20521]
- 请勿发表此类内容[14484]
- 致初学PLC者:新人学PLC编程的...[18070]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
