PID原理和调试详解 点击:216 | 回复:0

1,PID是一个闭环控制算法。因此要实现PID算法,必须在硬件上具有闭环控制,就是得有反馈。比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制路线上,下面也将以转速控制为例。
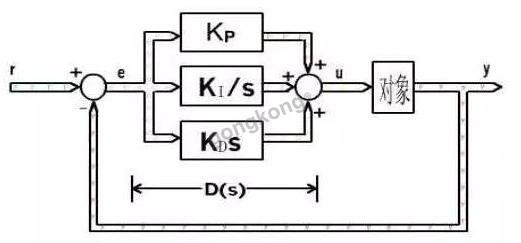
2,PID是比例(P)、积分(I)、微分(D)控制算法。但并不是必须同时具备这三种算法,也可以是PD,PI,甚至只有P算法控制。我以前对于闭环控制的一个最朴素的想法就只有P控制,将当前结果反馈回来,再与目标相减,为正的话,就减速,为负的话就加速。现在知道这只是最简单的闭环控制算法。
3,比例(P)、积分(I)、微分(D)控制算法各有作用:
比例,反应系统的基本(当前)偏差e(t),系数大,可以加快调节,减小误差,但过大的比例使系统稳定性下降,甚至造成系统不稳定;
积分,反应系统的累计偏差,使系统消除稳态误差,提高无差度,因为有误差,积分调节就进行,直至无误差
微分,反映系统偏差信号的变化率e(t)-e(t-1),具有预见性,能预见偏差变化的趋势,产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,因此可以改善系统的动态性能。但是微分对噪声干扰有放大作用,加强微分对系统抗干扰不利。积分和微分都不能单独起作用,必须与比例控制配合。
4,控制器的P,I,D项选择:根据实际的目标系统调试出最佳的PID参数。
二、PID参数调整口诀
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低四比一
一看二调多分析,调节质量不会低
若要反应增快,增大P减小I
若要反应减慢,减小P增大I
如果比例太大,会引起系统震荡
如果积分太大,会引起系统迟钝





楼主最近还看过
- 用时间继电器控制电磁阀
 [10846]
[10846] - 西门子S7-1200与基恩士扫码器...[8999]
- 如何上传永宏PLC程序到计算机...[13041]
- 免费提供LS(LG)PLC编程软件(...[17038]
- 三菱PLC只有输入信号没有输出...[13819]
- 求助:OPC到底是什么东西[21244]
- 成为编程高手的八大奥秘(转载...[7746]
- NAMUR型二线制接近开关怎么能...[21397]
- 亿万电器网FTP怎么不能正常登...[14841]
- 西门子PLC s7-200读取电磁流...[7602]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
