机器人需要更具场景适用性的导航方案 点击:40 | 回复:1






楼主最近还看过

发表于:2019-03-18 14:13:58
1楼
机器人需要更具场景适用性的导航方案
提到机器人导航定位,很多人首先想到的便是激光雷达。激光雷达作为目前最成熟的三维测量传感器,具有精度高、响应快的优势,已经被广泛的应用于机器人行业,但这种技术也有其无法忽略的问题——成本高、系统可靠性低。
无论是应用于扫地机器人的低端雷达抑或应用于工业机器人的高端雷达,激光雷达的成本已经是机器人厂商成本的重要支出。此外,在功能效果上,由于激光雷达受限于单一的信息采集模式,遇到走廊等相似场景容易出现“假回环”,导致位置丢失,并且在异常位置、开机重启等情况下,激光雷达也很难进行快速准确的重定位。因此,在酒店、室外等场景中,采用激光雷达导航的机器人更容易出错。
如何找到一种成本更低,性能更可靠的机器人导航定位方案,成了很多机器人厂商共同关注的问题。针对这一问题,国内计算机视觉方案提供商INDEMIND联合创始人姜文给出了自己的答案——视觉导航。
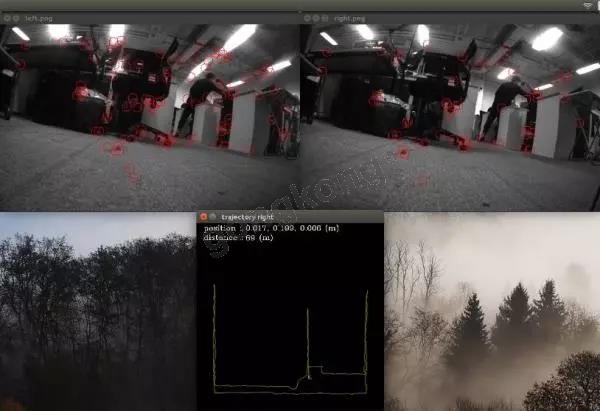
视觉导航,顾名思义,就是通过视觉摄像头捕捉环境信息,以获取移动物体在空间中所处的位置、方向及其他信息,并通过一定的算法对所获信息进行处理,建立环境地图,进而规划一条最优或近似最优的的无碰触路径,是一种成本更低、场景适用性更强的导航定位方案。
热门招聘
相关主题
- 5G对社会的影响
 [652]
[652] - 智能观察 ----- “三会聚首...[1079]
- 智能制造新理念——如何做供应...[1046]
- 年终盘点: 十大领域智能制造...[1130]
- 19个轴怎么用运动控制卡实现...[1549]
- INTOUCH两个画面合并,窗口导...[744]
- 请问学自动化的有必要考电工...[798]
- 智能制造中的故障诊断和预测...[16222]
- PLC中的CIM系统[1204]
- 智能观察---3D打印创客从娃娃...[1610]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
