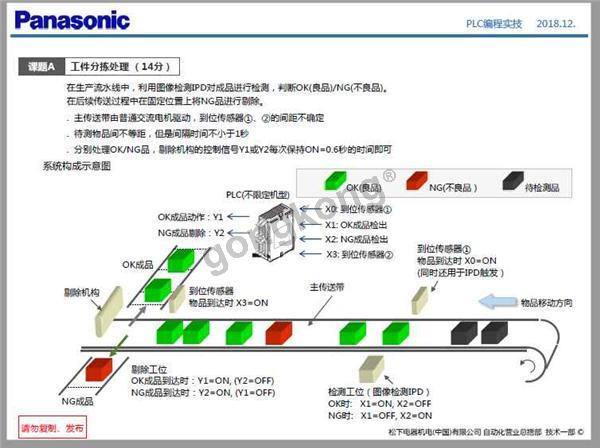
松下公司出的一道题目,那位帮忙讲解一下思路。 点击:1567 | 回复:19









/////////////// "Global".Global.BUFFER[#I]为缓存数据用数组\\\\\\\\\\\\
///////////////通过BOOL_IN上升沿,数据按号顺序存储到数组内\\\\\\\\\\\\
IF #BOOL_IN AND NOT "Tag_5" THEN
#I := #I + 1;
"Global".Global.BUFFER[#I] := #CCD_IN;
END_IF;
"Tag_5" := #BOOL_IN;
///////////////通过BOOL_OUT上升沿,读取最先进栈的数据状态输出给OUT_Y\\\
///////////////状态读取后,栈位往下移一位,刷新堆栈数据\\\\\\\\\\\\
IF #BOOL_OUT AND NOT "Tag_6" THEN
#OUT_Y := "Global".Global.BUFFER[1];
FOR #J := 2 TO 11 DO
"Global".Global.BUFFER[#J - 1] := "Global".Global.BUFFER[#J];
END_FOR;
ELSIF NOT #BOOL_OUT THEN
#OUT_Y := 0;
END_IF;
"Tag_6" := #BOOL_OUT;
/////////////// "Global".Global.BUFFER[#I]为缓存数据用数组\\\\\\\\\\\\
///////////////通过BOOL_IN上升沿,数据按号顺序存储到数组内\\\\\\\\\\\\
IF #BOOL_IN AND NOT "Tag_5" THEN
#I := #I + 1;
"Global".Global.BUFFER[#I] := #CCD_IN;
END_IF;
"Tag_5" := #BOOL_IN;
///////////////通过BOOL_OUT上升沿,读取最先进栈的数据状态输出给OUT_Y\\\
///////////////状态读取后,栈位往下移一位,刷新堆栈数据\\\\\\\\\\\\
IF #BOOL_OUT AND NOT "Tag_6" THEN
#OUT_Y := "Global".Global.BUFFER[1];
FOR #J := 2 TO 11 DO
"Global".Global.BUFFER[#J - 1] := "Global".Global.BUFFER[#J];
END_FOR;
ELSIF NOT #BOOL_OUT THEN
#OUT_Y := 0;
END_IF;
"Tag_6" := #BOOL_OUT;


 定义缓存容量的时候估计一下写入到读出中间最大会有多少的个产品。可以实现同时读写不干涉。
定义缓存容量的时候估计一下写入到读出中间最大会有多少的个产品。可以实现同时读写不干涉。IF "FirstScan" = TRUE THEN;
#i := 0;
#J := 0;
END_IF;
IF #传感器A信号=TRUE AND NOT #A脉冲信号 THEN ;
#数组A[#i] := NOT #相机信号A AND #相机信号B = TRUE;
#i := #i + 1;
END_IF;
#A脉冲信号 := #传感器A信号;
IF #传感器B信号 = TRUE AND NOT #B脉冲信号 THEN ;
#OUT := #数组A[0];
FOR #J := 1 TO 10 BY 1 DO;
#数组A[#J - 1] := #数组A[#J];
END_FOR;
END_IF;
IF #传感器B信号 = TRUE AND NOT #B脉冲信号 AND #i>0 THEN;
IF #OUT = TRUE THEN ;
#OUT_A := TRUE;
#OUT_B := FALSE;
END_IF;
IF #OUT = 0 THEN ;
#OUT_A := FALSE;
#OUT_B := TRUE;
END_IF;
#计时器启动 := TRUE;
END_IF;
#B脉冲信号 := #传感器B信号;
#IEC_Timer_0_Instance(IN :=#计时器启动 ,
PT := T#0.6S,
Q => #计时器A);
IF #计时器A = TRUE THEN;
#OUT_A := FALSE;
#OUT_B := FALSE;
#OUT := FALSE;
RESET_TIMER(#IEC_Timer_0_Instance);
#计时器启动 := FALSE;
#i := #i - 1;
END_IF;
IF "FirstScan" = TRUE THEN;
#i := 0;
#J := 0;
END_IF;
IF #传感器A信号=TRUE AND NOT #A脉冲信号 THEN ;
#数组A[#i] := NOT #相机信号A AND #相机信号B = TRUE;
#i := #i + 1;
END_IF;
#A脉冲信号 := #传感器A信号;
IF #传感器B信号 = TRUE AND NOT #B脉冲信号 THEN ;
#OUT := #数组A[0];
FOR #J := 1 TO 10 BY 1 DO;
#数组A[#J - 1] := #数组A[#J];
END_FOR;
END_IF;
IF #传感器B信号 = TRUE AND NOT #B脉冲信号 AND #i>0 THEN;
IF #OUT = TRUE THEN ;
#OUT_A := TRUE;
#OUT_B := FALSE;
END_IF;
IF #OUT = 0 THEN ;
#OUT_A := FALSE;
#OUT_B := TRUE;
END_IF;
#计时器启动 := TRUE;
END_IF;
#B脉冲信号 := #传感器B信号;
#IEC_Timer_0_Instance(IN :=#计时器启动 ,
PT := T#0.6S,
Q => #计时器A);
IF #计时器A = TRUE THEN;
#OUT_A := FALSE;
#OUT_B := FALSE;
#OUT := FALSE;
RESET_TIMER(#IEC_Timer_0_Instance);
#计时器启动 := FALSE;
#i := #i - 1;
END_IF;
- 变频器使用中的常见问题之1
 [8341]
[8341] - 求助;用三菱plc,GX Develope...[15564]
- 分析分析这把电动剃头剪的工...[14808]
- 两个伺服怎么实现直线或者圆...[15739]
- EM235模块如何与三线制变送器...[8833]
- 请教:怎样在WINCC画面中弹出...[14609]
- 一位自控工程师的成长过程![19057]
- 模拟量输出模块(4-20MA)电流...[8747]
- 学习和利时PLC过程中遇到的问...[7234]
- 这个就是典型的会用温控表做...[8836]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
