pid自整定原理与方法 点击:1389 | 回复:7

近几年来,调节器以其功能强大,性能价格比高的优点在工业控制领域得到广泛应用。这些调节器大多具有PID参数自整定功能,给用户带来极大方便,如日本岛、国内的昌晖仪表、厦门宇电、福建虹润等都有这类自整定调节器。通过观察调节器的自整定过程,可以确认这类调节器采用的都是PID参数继电自整定法。为了进一步用好这种仪表,本文讨论调节器的PID自整定的原理和方法。
调节器的PID自整定过程
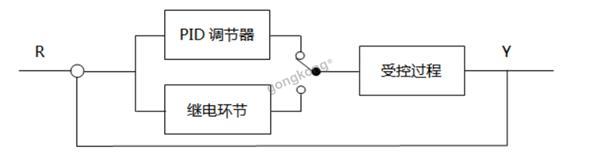
若测出了系统的一阶模型,或得出了系统的临界比例增益Kc和振荡周期Tc,则可很容易地设计出PID调节器。继电型自整定的基本想法是,在控制系统中设置两种模态:测试模态和调节模态。在测试模态下,调节器自动转换成位式调节,即当测量值小于设定值时,调节器输出为满量程,反之为零,使系统产生振荡,振荡过程中调节器自动提取被控对象的特征参数;而在调节模态卞由系统的特征参数首先得出PID控制器,然后,由此控制器对系统进行调节。继电型PID自主定控制结构如图1所示。当需要PID参数整定时,开关置于调整处,系统按继电反馈建立起稳定的极限环振荡后,就可以根据系系统响应特征确定PID参数。自整定计算完成后开关置于调节处,系统进入正常控制。
继电PID自整定控制结构示意图
图1 继电PID自整定控制结构示意图
PID参数自整定的原理
测试模态下,系统的等效框图如图2所示。确定系统的振荡频率ωc与增益Kc有多种方法,比较常用的是描述函数法,此方法实际上是根据非线性环节输入信号与输出信号之间基波分量关系来进行近似的一种有效方法。
继电反馈系统结构图

图2 继电反馈系统结构图
①非线性特征的描述函数N(A)是指:当输入时正弦信号Asin(ωt)时,输出的基波分量Ysin(ωt+φ)对输入正弦量的复数比,即:
其中A1、B1是输出Y(t)的傅立叶级数的一次项系数。
实际的带有回环的节点非线性环节特性的描述函数可以表示为:公式中A为正弦波幅值,d为回环幅值,ε为回环宽度的一半。
②由极限环振荡确定被控对象特征参数
设被控对象的传递函数为如下形式:
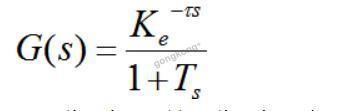
其中K为对象的增益,T为对象的时间常数,τ为对象的滞后时间。
考虑由具有传递函数G(s)的对象和具有继电特性的反馈部分组成的简单反馈系统如图2所示。这时系统的闭环特征方程发生振荡的条件可以写成:1+N(A)G(s)=0 (s=jωc),即G(jωc)=-1/N(A)。 设该等式的实部和虚部均为零,则可得出振荡频率Wc的增益Kc,在这里只考虑一种简单的情况,假设继电特征非线性环节不带有回环,即若设ε=0,则描述函数可以化简成N(A)=4d/πAc,临界振荡周期Tc=2π/ωc可通过直接测量输出相邻峰值的时间确定。
③PID参数整定算法
在得到对象的临界增益和临界振荡周期后,就可以根据Ziegle-Nichols算法确定PID参数。这样,用继电反馈的方法整定出了PID调节器参数。如表所示:
调节器规律 Kp Ti Td
P 0.5Kc —— ——
PI 0.45Kc 0.8Tc ——
PID 0.6Kc 0.5Tc 0.12Tc
PID参数继电自整定法是一种简单的自适应控制方法,它所需要的数据量小,实现简单,调节效果好,特别适用于内存量较小的调节器,因而得到广泛的应用。在设计中合理使用自整定功能,对提高PID调节器的科技含量具有重要意义。





楼主最近还看过

 感谢楼主分享
感谢楼主分享
- 浙大中控43个技术问答
 [2866]
[2866] - 求教什么是PID[2064]
- 知道西门子的DCS吗?[2000]
- 关于ABB的DCS系统[5150]
- 求助:电厂DCS系统选型[1858]
- 国产DCS三足鼎立[2009]
- 有对焦化集气管压力调节系统...[3571]
- 第十五讲 浅谈国产DCS系统[24768]
- 浙大中控计算机安装规范[3060]
- DCS调试惊险一幕[5176]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
