求DX200与欧姆龙使用Ethernet/IP通讯手顺 点击:3536 | 回复:26









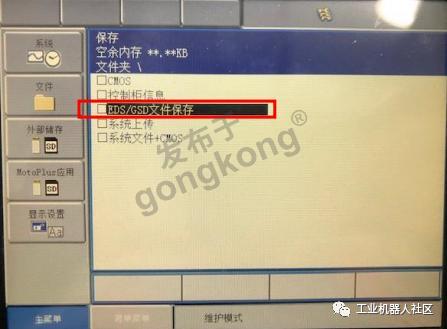 配置设置一下直接导出
配置设置一下直接导出


热门招聘
相关主题
- RobotStudio软件
 [3732]
[3732] - ABB机器人培训资料之五,一共...[4067]
- 哪里有ABB机器人培训[1240]
- 埃斯顿普通六轴机器人过限位...[1725]
- 工业机器人快速维修方法[2769]
- ABB机器人robotware6.0以上C...[2603]
- 求ABB ROBOT IRC5与三菱q pl...[5275]
- SVGN-370 发那科机器人报警代...[1255]
- EPSON四轴机械手不动作[830]
- 五轴水平多关节焊接机器人[1017]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
