ABB机器人示教器以及软件介绍——ABB机器人技术 点击:4025 | 回复:2


ABB机器人的 FlexPendant、IRC5控制器和RobotStudio。 基本的IRC5 ABB机器人系统由ABB机器人控制器、FlexPendant、RobotStudio和一个或几个机器人或其它机械单元组成。可能还有过程设备和其它的软件选项。 描述的是不包含选项的IRC5基本系统。但是,在某些地方,手册对如何使用 或应用选项进行概述。多数选项都在其各自的应用手册中进行了详细的描述。
FlexPendant简介
FlexPendant(有时也称为TPU或教导器装置)是一种手持式操作员装置,用于执行 与操作机器人系统有关的许多任务:运行程序;使操纵器微动;修改机器人程序等。 FlexPendant可在恶劣的工业环境下持续运作。其触摸屏易于清洁,且防水、防油、 防溅锡。
IRC5的成套计算机和主要部件
FlexPendant由硬件和软件组成,其本身就是一成套完整的计算机。FlexPendant是 IRC5的一个组成部分,通过集成电缆和连接器与控制器连接。而hotplug按钮选项 可使得在自动模式下无需连接FlexPendant仍可继续运行。
这些为FlexPendant的主要组成部分。
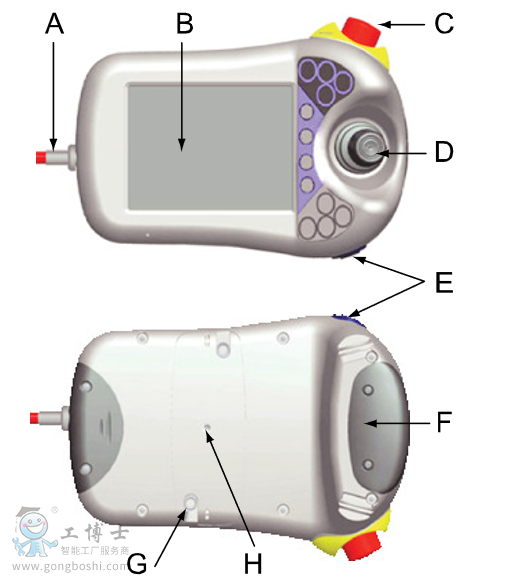
A 连接器
B触摸屏
C紧急停止按钮
D控制杆
E USB端口
F使动装置
G触摸笔
H重置按钮
控制杆
使用控制杆移动操纵器。它称为微动控制机器人。控制杆移动操纵器的设置有几种.
USB端口
将USB存储器连接到USB端口以读取或保存文件。USB存储器在对话和FlexPendant 浏览器中显示为驱动器/USB:可移动的。 注意!在不使用时盖上USB端口的保护盖。
触摸笔
触摸笔随FlexPendant提供,放在FlexPendant的后面。拉小手柄可以松开笔。 使用FlexPendant时用触摸笔触摸屏幕。不要使用螺丝刀或者其他尖锐的物品。
重置按钮
重置按钮会重置FlexPendant,而不是控制器上的系统.
注意 USB端口和重置按钮对使用RobotWare5.12或更高版本的系统有效。这些按钮对于较旧的系统无效。
硬按钮
FlexPendant上有专用的硬件按钮。您可以将自己的功能指定给其中四个按钮。
预设按键

A-D选择机械单元。
E 切换运动模式,重定向或线性。
F 切换运动模式,轴1-3或轴4-6。
G 切换增量。
H StepBACKWARD(步退)按钮。按下此按钮,可使程序后退至上一条指令。
J START(启动)按钮。开始执行程序。
K StepFORWARD(步进)按钮。按下此按钮,可使程序前进至下一条指令。
L STOP(停止)按钮。停止程序执行
更多ABB机器人技术支持请点击:http://abb_robots.gongboshi.com/
ABB机器人信息请点击:ABB机器人





- 压铸机、重力浇铸机的给汤机,...
 [1527]
[1527] - 川崎机器人AS语言参考手册[4471]
- 同学们发新书了——不要抢都有...[2778]
- 爱普生EPSON的机器人有离线仿...[4396]
- 川崎机器人程序,已经测试在客...[3919]
- 松下A5伺服驱动器PR0.11和PR...[3456]
- 松下VR-600G2机器人[1169]
- ABB机器人任务切换[854]
- 要仿造一台机器人,用什么电机...[4123]
- 做移动机器人控制,用PC104控...[1503]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
