激光or视觉,机器人导航定位该选谁? 点击:986 | 回复:1






楼主最近还看过

取代、融合,导航方案需要因地制宜
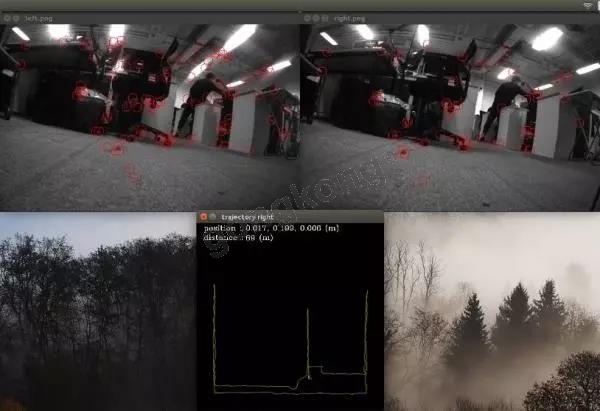
与现阶段广泛应用的激光雷达方案相比,视觉导航依靠立体视觉摄像头采集环境图像,成本无疑要低很多。但视觉导航图像处理本身非常占用计算资源,对算法能力要求极高,同时视觉探测的原理也只是尽可能接近物理探测,因此在精度上仍略有不足,所以在具体使用上要因地制宜,结合场景应用。
在姜文看来,在以扫地机为代表的小型机器人底盘上,视觉导航方案是一种替代性的方案,可以取代现有的激光雷达方案,以更低的成本实现建图、导航、避障甚至回充等功能,并且智能化程度更高,具有很强的交互潜力。但在以安全为前提的服务机器人上,视觉导航更合理的使用方式是与现有激光、里程计等多传感器融合,解决假回环、重定位、深度测量等问题,进一步提高机器人的鲁棒性,满足更为严苛的使用需求。
除此之外,视觉导航还能为机器人带来交互能力的提升。姜文告诉记者,视觉作为最高纬度的感知手段,不仅可以进行测距、导航定位,更可以对事物进行识别和理解,为机器人提供了获取语义地图的能力。
举个简单的例子,扫地机器人在家中工作时,会进入各个房间,遇到各种障碍,结合INDEMIND视觉技术的机器人可以识别出每个房间的用途,同时也识别出各种遗留在地面上的障碍物,结合导航策略,可以有效的避开衣物、线缆、宠物粪便等对机器人造成伤害的物品,同时结合上层语音控制技术,还可以根据主人的命令,自主识别餐厅、厨房甚至餐桌下方等区域,执行指定的清扫任务。可以想象,未来的机器人不再只是效率提高了一些,聪明了一点,而是可以真的具有与人进行基本交互的智能机器人。
另外,对于现有机器人接入视觉导航方案的成本问题,姜文表示,成本主要分布在两个方面,得益于INDEMIND对于算法的强大优化能力,算力成本已经非常低廉,结合可见光等传感器,整个模组的成本要远低于低端激光雷达,更不用和高端激光雷达对比了。而另一方面则是集成成本,INDEMIND作为市面上为数不多的完整解决方案提供商,在扫地机器人等小型平台上可以直接根据参考设计进行调试部署,而对于大型机器人,则可以提供不同平台不同版本的SDK,只要跟产品当前的算法系统进行简单的松组合融合匹配,就可以发挥视觉绝大部分作用,如果采用深度定制方案,更可以从底层开始融合优化,最终带来非常好的实际效果。
总的来说,与激光雷达方案相比,视觉导航是一个维度更高、成本更低、适用性更强的机器人导航定位方案,未来,随着算力的提升,算力成本的降低,视觉导航方案的成本可以进一步下探;并且伴随研究的深入,视觉导航所带来的环境语义功能日趋完善,具有更高维度交互潜力的智能视觉机器人无疑在面临下一轮竞争时更具优势,因此,可以预见视觉导航方案广阔的发展前景,视觉导航也必将成为机器人导航领域的主流。
- 工控机有哪几种防控等级?
 [830]
[830] - 【西格原创】浅析MES+离散数据...[690]
- 智能提醒---深圳又一家大型制...[1059]
- 智慧园区实践产业发展新思路[807]
- 电动吊篮的突发倾斜状态的处...[797]
- 数字化转型的基础与前提[713]
- 科普日记实-----一场以“万众...[915]
- 台达PLC与台达变频器通讯范例...[975]
- RPA干货丨详解RPA的设计与构...[725]
- 什么是防火门门磁开关[2911]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
