伺服 看图说话,大家都来看 点击:2939 | 回复:25








回复内容:
对:ShowMotion关于仅看图不知道是否达到最佳,要结合电机型号,速度环PI参数、电机的惯量、驱动器最大输出扭矩参数都会影响到速度环响应。 内容的回复:
Show老师,能不能给指指路,我自己在这里调试,没什么目标和指标去实现,只是天天调试,调试的结果好不好都不知道。这个没有接触过。
如果像写个程序实现a+b=c,这个就很明确,我也明白和知道。
但是这个伺服电机,最后要调试到什么程度算是基本可以,调到什么程度算是可以用,调到什么程度就是比别的厂家的NB,这些能指点一下吗。谢谢啊。
这是用在SCARA机械臂上的,4轴水平关节机器人
回复内容:
对:ShowMotion关于安川ΣV具有免调整功能,一般无需调节,这个是日系里面做得最好的,我们正在研究这一块。当然,免调整不能达到效果时可以采用高级自动调谐功能或单参数调谐。如果你想体验一把PID参数对控制效果的相关性,你可以将PID参数与位置跟踪误差、速度差结果进行对比。一般来讲,位置增益、速度增益加大,位置跟随、速度响应更好,加大到一定程度,会出现振荡、超调,噪音加大,你可以再调节一下振动抑制参数包含频带和深度,将这些结果用excel记录下来,用matlab拟合一下,看看相关趋势如何,就会有较深刻的感受。内容的回复:
谢谢show老师的回复,感觉说到我想知道的东西。
1、用matlab拟合以下,看看趋势,这样子以后调试就有一定的理论支撑是吧?
2、我现在用的是安川的2型和3型,开启自动调节后,通过读取面板数据,位置环增益、速度环增益、速度环积分时间常数和振动抑制参数不变,但是虽然面板上无变化,但是内部确实已经改变了数值,是吧?
3、我对照手册,只进行了对位置环增益、速度环增益、速度环积分时间常数和振动抑制参数这四个参数进行修改和调试。
引用 三番五次 的回复内容:
1、用matlab拟合以下,看看趋势,这样子以后调试就有一定的理论支撑是吧?2、我现在用的是安川的2型和3型,开启自动调节后,通过读取面板数据,位置环增益、速度环增益、速度环积分时间常数和振动抑制参数不变,但是虽然面板上无变化,但是内部确实已经改变了数值,是吧?3、我对照手册,只进行了对位置环增益、速度环增益、速度环积分时间常数和振动抑制参数这四个参数进行修改和调试。
自动整定时,PID参数会即时生效,这些参数是隐藏的,面板上看不到,调试软件中有可能看到,看厂家开不开放;
位置环增益、速度环增益、速度环积分时间常数和振动抑制参数是主要参数,还有一些位置前馈、速度前馈参数对性能的影响也很显著,这些参数只有自己手调才有深刻的体验。
PID调节经验的东西多一些,多试就有感觉;
回复内容:
对:ShowMotion关于引用 三番五次 的回复内容:1、用matlab拟合以下,看看趋势,这样子以后调试就有一定的理论支撑是吧?2、我现在用的是安川的2型和3型,开启自动调节后,通过读取面板数据,位置环增益、速度环增益、速度环积分时间常数和振动抑制参数不变,但是虽然面板上无变化,但是内部确实已经改变了数值,是吧?3、我对照手册,只进行了对位置环增益、速度环增益、速度环积分时间常数和振动抑制参数这四个参数进行修改和调试。自动整定时,PID参数会即时生效,这些参数是隐藏的,面板上看不到,调试软件中有可能看到,看厂家开不开放;位置环增益、速度环增益、速度环积分时间常数和振动抑制参数是主要参数,还有一些位置前馈、速度前馈参数对性能的影响也很显著,这些参数只有自己手调才有深刻的体验。PID调节经验的东西多一些,多试就有感觉; 内容的回复:
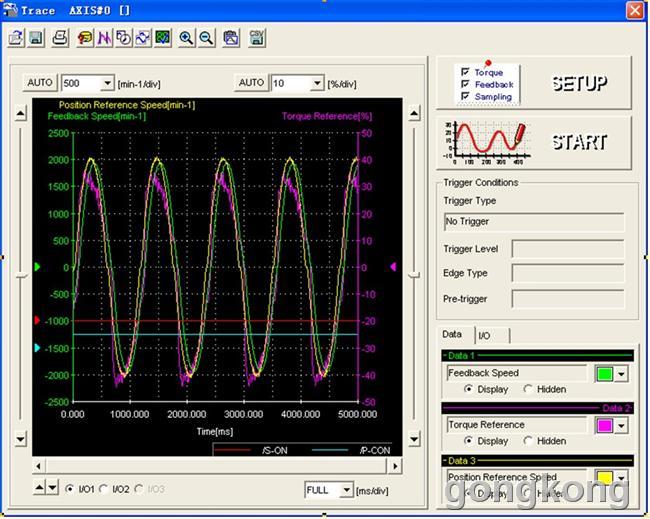
我调试了一下,基本四个电机都是改成手动调谐,惯量比用上位机软件读出填进去的,刚性设置为1。手动调谐后,反馈速度波形和位置参考速度波形有时间不同步,大约有60ms的延迟。然后我修改了位置环增益,改的比较大,慢慢的这两条波形吻合在一起了。最后这几个电机的位置环增益基本都设置到了刚性为7的数值上去了。通过增大位置环增益之后,发现机械手运动时效果好多了
1、show老师,反馈速度和位置参考速度的曲线吻合是不是就是响应特性
2、我的力矩波在±20%范围变化是否正常
3、位置误差波在±1500范围变化是否正常
4、我的机械手34两轴耦合,当我快速旋转3轴,4轴上下移动总是滞后,所以表面现象就是在旋转的时候还伴随着上下移动,当我把3轴电机的位置环增益变大之后,现象消失,变为正常。
5、我修改速度环参数没看见波形什么太大的变化。如果有变化,应该是哪个波形比较显著
谢谢show老师
看你工作在什么模式,就关心相应的对象。速度模式下控制对象是速度,位置模式控制对象是位置,响应好坏就是反馈与输入的是否很好的跟随,反馈和输入的对比,越接近、越重合表示跟随性越好,响应越快。
位置模式下其关键作用的是位置比例增益和前馈增益,位置模式下速度环参数作用稍弱;
速度模式下不存在需要设置位置参数问题,关键作用的是速度增益和速度积分,有的提供速度前馈控制,效果明显;
位置或速度模式下,力矩大小是自动调整的,只要电机电流环参数和电机电感、电阻匹配,力矩的大小不是问题,它和加速度、转动惯量及阻力负载相关。
位置误差取决于前馈增益和位置差增益,误差大小还和编码精度有关系,不能一概而论。大小根据需要来选择,有些追求位置误差越小越好,有些加工追求加工表面的平滑,不要求误差越小越好。
对:ShowMotion关于看你工作在什么模式,就关心相应的对象。速度模式下控制对象是速度,位置模式控制对象是位置,响应好坏就是反馈与输入的是否很好的跟随,反馈和输入的对比,越接近、越重合表示跟随性越好,响应越快。位置模式下其关键作用的是位置比例增益和前馈增益,位置模式下速度环参数作用稍弱;速度模式下不存在需要设置位置参数问题,关键作用的是速度增益和速度积分,有的提供速度前馈控制,效果明显;位置或速度模式下,力矩大小是自动调整的,只要电机电流环参数和电机电感、电阻匹配,力矩的大小不是问题,它和加速度、转动惯量及阻力负载相关。位置误差取决于前馈增益和位置差增益,误差大小还和编码精度有关系,不能一概而论。大小根据需要来选择,有些追求位置误差越小越好,有些加工追求加工表面的平滑,不要求误差越小越好。内容的回复:
谢谢show老师,我接着调试,我用的是位置控制方式,昨天调的位置环增益,今天调前馈增益
对:ShowMotion关于看你工作在什么模式,就关心相应的对象。速度模式下控制对象是速度,位置模式控制对象是位置,响应好坏就是反馈与输入的是否很好的跟随,反馈和输入的对比,越接近、越重合表示跟随性越好,响应越快。位置模式下其关键作用的是位置比例增益和前馈增益,位置模式下速度环参数作用稍弱;速度模式下不存在需要设置位置参数问题,关键作用的是速度增益和速度积分,有的提供速度前馈控制,效果明显;位置或速度模式下,力矩大小是自动调整的,只要电机电流环参数和电机电感、电阻匹配,力矩的大小不是问题,它和加速度、转动惯量及阻力负载相关。位置误差取决于前馈增益和位置差增益,误差大小还和编码精度有关系,不能一概而论。大小根据需要来选择,有些追求位置误差越小越好,有些加工追求加工表面的平滑,不要求误差越小越好。内容的回复:
show老师,我的位置控制通过调节位置环增益,将响应性变强了,通过调节前馈增益,将跟随性变强了。
1、振动和噪音这两个怎么察看和调节,即如何才算是振动,和如何才算噪音。
2、现在用肉眼看,机械手运转正常
- 今天去了南京名爵,发现因为宝...
 [1129]
[1129] - 设计一个移动供水机器人.......[1131]
- ABB机器人视频教程二[1141]
- ABB机器人操作手册[789]
- 使用机械手的原因[1024]
- IAI机械手XSEL系列控制器用软...[5151]
- 川崎机器人控制器D系列 AS语...[1241]
- 求motosim_EG-VRC中文说明书[812]
- 第一讲 第四节 工业机器人坐...[30469]
- 机械手的主要几种类型[908]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
