从伺服工作的基本原理来解析编码器信号处理的过程 点击:8689 | 回复:248

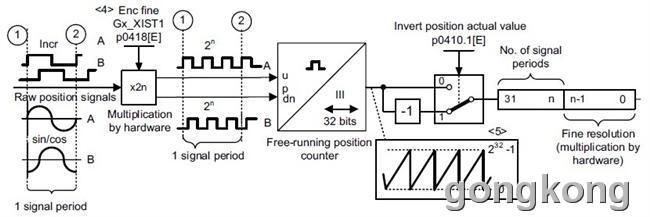
一、上面的是征提供的欧系某款驱动器的编码器信号处理框图;
二、我从伺服工作的基本原理来解析编码器信号处理的过程:
引用 东山脚下-骑士军团 的回复内容:这就是典型的闭环控制系统的基本原理
1、这就是典型的闭环控制系统的基本原理 ;
2、通常我们说编码器的刻线数,是指一条刻线的刻线数,例如说,这个编码器的刻线数是1024;
3、那我们会马上意识到,这个编码器的解析度最大就是1024×4=4096;
4、我们还会知道,这个编码器周反馈脉冲数有三种可以由用户选用1024、2048、4096;
5、这个图中有两个计数器,一个是编码器反馈脉冲的计数器,也是伺服当前实际位置的计数器,即图中Free-running position counter,他的读数就是伺服当前的实际位置;
6、另一个计数器就是最右边的N0.of signal period,这个计数器就是指令脉冲计数器,用户输入的指令脉冲数就储存在这个计数器中,伺服运行中,它的读数就是距离目标控制位置或者简单说距离终点的指令脉冲数;
7、这两个计数器的读数是互补的,就是说他们的读数的和,等于伺服运行全程的指令脉冲数;
8、这个典型的闭环控制系统中,还有一个非常重要的乘法器multiplication by hardware ;
9、乘数x 2^n,,它的倒数I/2^n就是我们平时说的电子齿轮比;
10、它是联系两个计数器的纽带,就是人民币与美元的换算率;
11、编码器周反馈脉冲数×2^n=周指令脉冲数
电子齿轮比=1/2^n=编码器周反馈脉冲数/周指令脉冲数
12、伺服的一个控制过程,就是当前位置反馈脉冲计数器的读数,由零到终点位置的读数;
13、伺服的一个控制过程,就是目标位置指令脉冲计数器的读数,由起点指令脉冲数到终点位置的零读数;
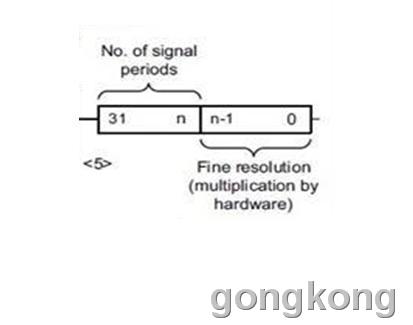
14、关于 Fine resolution 高分辨率高解析度脉冲数,它是1个n位数,等于n-1、n-2、…、0;
15、这个n位数的脉冲数等于指令脉冲数÷2^n的余数,例如
1)周指令脉冲数65536;
2)编码器周脉冲数=4096;
3)2^n=16,即 周指令脉冲数65536=编码器周脉冲数4096×2^n
4)指令脉冲数=65536λ
5)Fine resolution脉冲数=65536λ÷16的余数,是1~15个,n=4;
14、关于 Fine resolution 高分辨率高解析度脉冲数,它是1个n位数,等于n-1、n-2、…、0;
15、这个n位数的脉冲数等于指令脉冲数÷2^n的余数,例如
1)周指令脉冲数65536;
2)编码器周脉冲数=1024;
3)2^n=64,即 周指令脉冲数65536=编码器周脉冲数1024×64
4)指令脉冲数=65536λ
5)Fine resolution脉冲数=65536λ÷64的余数,是1~63个,n=6;
16、征说“Fine resolution 部分: 对4倍频的光电编码器而言,这个位域占用两位”,是不懂装懂,压根就不知道是怎么回事!
17、征说“2~31的数值是由计数器对倍频的信号自动累加得来的,这一部分表示电机转过的线数。对1024线编码器, 计数范围最大为 2^30/1024 = 1048576 圈”;
18、这个计算用1024就是错误的,应该用4096×16=65536,去除2~31的数值,即
2^30/65536 = …… 圈;
19、就这个伺服位置闭环图,征从前到后,犯了多少错?表现出对控制原理完全不懂,表现出数量关系不清楚,征得表述就是胡说八道!
三、同时转征对该图的解析如下:
还是费点功夫简单讲解一下, 以光电编码器为例:
1) 左侧的 1 2 图
表示的1 signal period , 表示的是光电编码器的一线输出的AB信号。光电编码器有多少线, 其旋转一周就输出多少个这样的脉冲。这个信号是随着电机转动连续输出的,在一个时刻看AB波形,你不知道电机转在哪个位置上, 只有AB信号的电平情况。
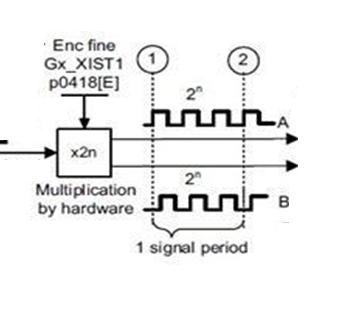
2)multiplication by hardware
图中的x2n, 实际上是错的, 应该是x 2^n, 这属于手册的编写错误
表示的是硬件对AB信号进行倍频, 即细分。对光电编码器就是4倍频, 即n = 2。
光电编码器的AB一个周期即1 signal period 经硬件4倍频后得到4个脉冲,四倍频就是对AB脉冲进行边沿检测。
3)中间的1 2
表示1 signal period 四倍频后得到的信号
4)Free-running position counter
表示的是位置计数器
这个位置计数器是由硬件来实现的, 由硬件根据3)中的脉冲序列来进行加减计数的。
计数方向即 加计数或减计数是由 AB信号的先后顺序决定的。不清楚的可以去百度搜搜, 就清楚了
5) P0410.1
是配置参数, 是否需要对计数器进行取负, 载调试时根据需要选择是否启用。
6) 最右侧32位的计数值部分
4)中的计数器对4倍频后的脉冲计数,一个脉冲一个脉冲进行记录,
Fine resolution 部分: 对4倍频的光电编码器而言,这个位域占用两位
实际的计数过程如下:
电机转动时,1)中的信号高低高低的连续变化, 经2)硬件4倍频后, 得到一系列的边沿检测后输出(即硬件4倍频)的脉冲信号3),这些脉冲由4)的计数器自动从最低位加减计数。最后得到一个计数值。
如果对这个计数值分析, 低2位表示细分的信号, 2~31位表示的编码器的原始信号。
但请注意一点, 2~31的数值是由计数器对倍频的信号自动累加得来的,这一部分表示电机转过的线数。
对1024线编码器, 计数范围最大为 2^30/1024 = 1048576 圈,如果电机以3000rpm转动, 保证电机转动1048576/3000 = 349.52533333333333333333333333333 分钟, 即大于这么长的时间后计数器翻转, 自动从0开始计数
在位置控制时, 需要的是这个32位计数器的整体数值,不会区分那一部分。
以上是对我提供的图的简要分析, 或者是一个我说明!






1、如果这个位移指令脉冲计数器,用户设置参数时,周指令脉冲是4096;
2、如果编码器解析度选用1024的;
3、那么multiplication by hardware 硬件构成的乘法器的po418就设置n=2,×2^n=4;
1024×4=4096
4、 Fine resolution 里有1~3个位移指令脉冲不能检测,需要高分辨率解析度4096的编码器检测;
5、那么Fine resolution 里的数位最多是2^2、2^1、2^0三位数;
6、这样我们得到一个关系式
编码器周脉冲数×2^n=周指令脉冲数
7、上述关系的作用是使得编码器脉冲计数器与指令脉冲计数器的脉冲数等价;
8、2^n的倒数,就是电子齿轮比;
引用 luedong 的回复内容:引用 刘志斌 的回复内容:1、这个图表示两种编码器:1)方波的为光电编码器,有4条相同位置相差90°的刻线构成;2)sin/cos为正、余弦编码器,有两条N、S相间的磁迹构成;2、每个编码器都可以输出3种对称均匀的刻线数,举例说,1条刻线数是1024线,那么这个编码器它可以输出1)1024线2)2048线3)4096线3、其中4096=1024×4,是1条刻线数的4倍;4、这些都是真正的物理的检测刻线,或者说是“原始”的刻线;5、由于编码器输出的刻线数是三种,所以用户可以自由选择! 哎!刘老师怎么看的图?raw position signals 这条线分为上下两部分表示的是两种不同类型的编码器上面的图上明明标着Incr,表示的是增量式光电编码器,增量式编码器用AB两相信号进行4倍频。 增量式的方波光电编码器用AB两相就够了,没有4条刻线用于倍频!实在不行找个编码器手册看看吧!说4条刻线就外行了! 下面的AB标着sin/cos,正余弦编码器, 也是只有AB两相,进行细分。
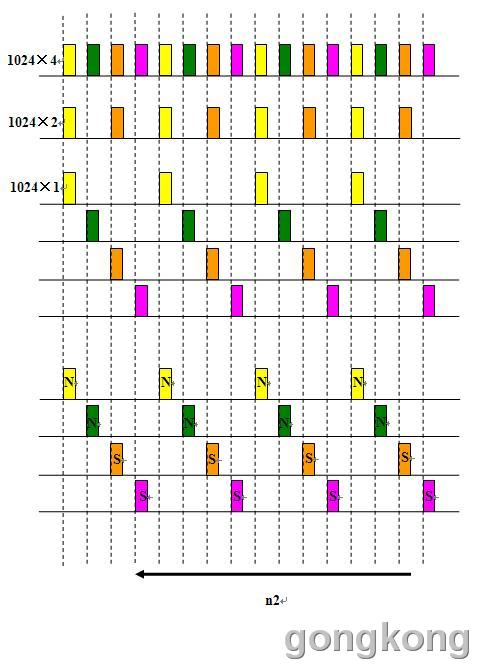
1、这是我说的,一个编码器,可以输出三个均匀的不同解析度的脉冲数;
2、其原理就是有4条完全相同的刻线,彼此落后90°而已;
3、正余弦编码器,虽是两条相同磁迹线,如果把一条N、S磁迹线分成一条N、一条S,那就是4条刻线;
4、这就是4的来历!

1、这是我说的,一个编码器,可以输出三个均匀的不同解析度的脉冲数;
2、其原理就是有4条完全相同的刻线,彼此落后90°而已;
3、正余弦编码器,虽是两条相同磁迹线,如果把一条N、S磁迹线分成一条N、一条S,那就是4条刻线;
4、这就是4的来历!
-----------------------------------
老劉 能否告訴我 你這是哪個國家做的編碼器
不管是光電 磁性 或其他方式做成的編碼器 有帶原點都是兩組刻線 沒帶原點就一刻線 前者有三個光耦合( 類似霍耳元件) 而行成 Z ,A B, A, B
方波可4倍頻 正是利用AB相 的相位差夠成的4倍頻 絕非你講的4刻線(況且你的方波的頻寬也畫錯 是180度 不是90度) 你在主樓貼的圖 是CT的 Smart Driver 也就是內置運動控制模組的驅動器 所以最高4倍頻 也可2倍頻 更可1倍頻
- 电气自动化专业英语教材
 [2340]
[2340] - “球磨机”是什么性质的负载?到...[3963]
- 转求助帖:请问伺服电机的传递...[8396]
- 这台冲压机器人比国产六轴机...[1787]
- 变频器翻译成英文是inverter...[24278]
- 电工电路模拟软件 0积分[2481]
- 自动控制常用词汇(自我总结)...[2819]
- 我总结的一些plc专用词汇[5467]
- 二线制,三线制,四线制热电阻...[21097]
- 我翻译的HART275操作手册(全...[3072]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
