转求助帖:请问伺服电机的传递函数如何确定 点击:8716 | 回复:29






楼主最近还看过

引用 通讯网 的回复内容:伺服控制器,就是将被控电机(整个系统)做的做到理想化。。。。 比如现在你理想中的电机,0-100V,0-100转,可调,精度0.0001,就是你给0.0001V的时候,他增加0.0001转,而且,不受力矩改变的影响,响应滞后为0.。。。。。 这是你理想的电机。。伺服系统,就是要做到你的理想状态。。。。起码在你工作的条件下,你可以认为它是理想的。。
理想化?
“现在你理想中的电机,0-100V,0-100转,可调,精度0.0001,就是你给0.0001V的时候,他增加0.0001转,而且,不受力矩改变的影响,响应滞后为0.。。。。。 这是你理想的电机。。伺服系统,就是要做到你的理想状态。。。。起码在你工作的条件下,你可以认为它是理想的。。”
你只知道需要达到的目的, 人家求助的是需要实现这个目的的过程!
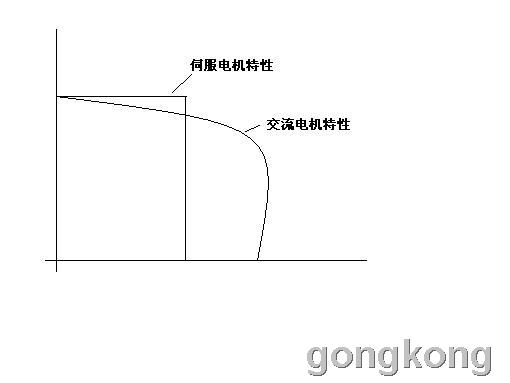
引用 征 的回复内容:楼上的, 你把问题想简单了, 因为你只在应用的角度看问题! 麻烦你找个安川或者松下的伺服驱动器看看, 想想到底怎么回事? 如果楼主问的是电压、负载和转速的关系呢?你总的有个数学公式来表达, 来阐述三者之间的关系! 你上面的那个图最多就是一个转矩和速度的关系图, 请问转矩怎么产生的?转矩跟电机的电流或者电压有什么关系?稳态是什么关系?动态是什么关系? 所以人家要的是传递函数!!!即用数学公式表示出来的电机模型! 建议翻翻自控原理和电机教材!
说你转不过弯来。。。。书能读进去不容易,读出来也不容易。。。。呵呵。。。

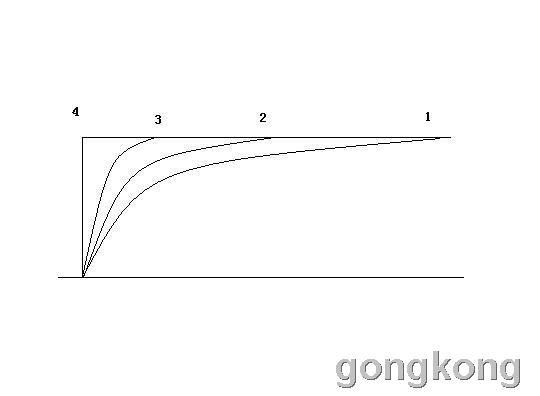
上面的第一个图中, 三个响应的波形是不对应的!
如果你用固定PI参数的PI控制算法, 这三个波形在图中表示的是错的!
哪家伺服驱动器做的是这样的波形?
要做成这样, 在业界就成为笑谈了!
蓝线、红线、绿线的问题, 跟电机没有关系。
伺服驱动器调整不同的参数, 这三种线都能做出来!直流电机更不在话下, 至于异步电机的变频器, 阶跃响应做不到很好!如果是异步电机的伺服, 应该也没有问题(现在异步伺服很少用)。
还有, 伺服在实际中为什么不能有阶跃响应?
如果用的人就非要这样用, 难道还必须在说明书中加一条:不支持阶跃给定?
加了, 又是一笑谈!
还有, 伺服在实际中为什么不能有阶跃响应?
如果用的人就非要这样用, 难道还必须在说明书中加一条:不支持阶跃给定?
加了, 又是一笑谈!
----------------------------------------------------
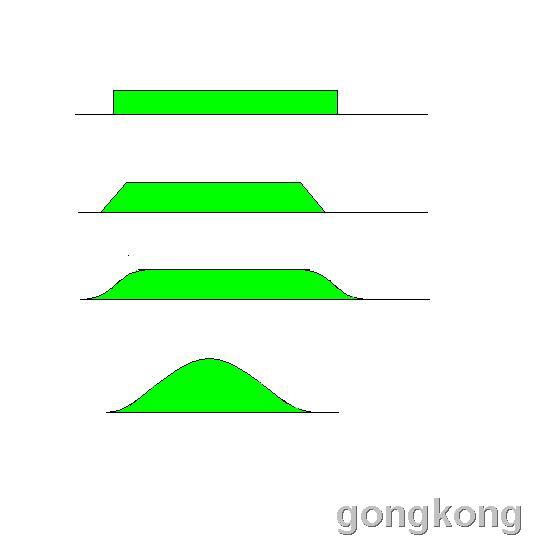
你没有实际工作经验,咱就不说了。。。比如说,变频器,你事先加一个10V信号,再加一个启动信号,相当于一个阶跃信号,电机会像阶跃信号一样,在0秒一瞬间达到50HZ么??不可能吧??!!运动控制器为什么要生成的运动曲线??? 高速公路拐弯为什么不设计成直角??。。。或者就按汽车最小转弯半径设计???还省空间?? ------都是一个道理---------就是要圆滑----------行话就是“曲率“是连续的-----这样才符合机器运行的特性。。。---阶跃信号,用的人他要非这样用,那他就是白痴。。。。呵呵。
给你上点专业的吧!!呵呵,这是美国艾默生的伺服--FM-3,前段时间给他们做的项目,这款驱动器是属于高科技,不对中国出口,不在国内卖的。。。。它自己可以生成它的运动轨迹,而且严格按照自己设定的运动轨迹运行。。
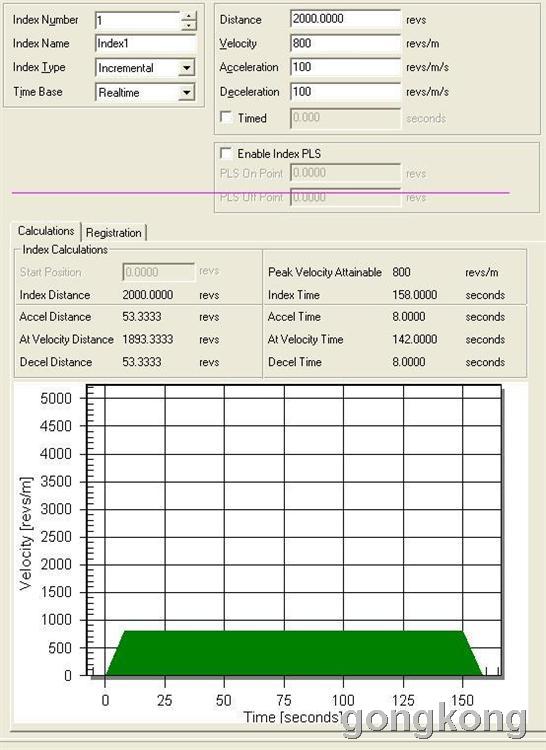
红线以上是设置数,红线以下是它根据你设定的数据自动生成的运动曲线,伺服电机将会严格地按照这根曲线(绿色曲线)运行。
如图,我设定,走2000转,平稳运行速度800转/分钟,加速度,减速度都为100转/秒,
它根据我的数据,计算结果如下:
整个曲线运行时间158秒
加速时间8秒
减速时间8秒
途中保持在800转/分的速度共142秒
整个过程共2000转
加速过程共53.3333转
减速过程共53.3333转
中间运行1893.3333转。
其中小数点后面的精度,由编码器得出。。。
启动这条index,它就会严格按照所计算的所有数据运行。。。最终误差,0.0001.。。。
程序里可以设置无数条这样的index,这些index可以通过编程,互相组合叠加,嵌套,完成复杂操作。。。看明白了么??
呵呵呵,当然,这个运动,只相当于上图的2号,更高级的可以生成4号的运行曲线,并且严格按照所计算的数据运行。。。。这个更复杂点。。。就先不说了。。
呵呵。。
引用 通讯网 的回复内容:给你上点专业的吧!!呵呵,这是美国艾默生的伺服--FM-3,前段时间给他们做的项目,这款驱动器是属于高科技,不对中国出口,不在国内卖的。。。。它自己可以生成它的运动轨迹,而且严格按照自己设定的运动轨迹运行。。红线以上是设置数,红线以下是它根据你设定的数据自动生成的运动曲线,伺服电机将会严格地按照这根曲线(绿色曲线)运行。 如图,我设定,走2000转,平稳运行速度800转/分钟,加速度,减速度都为100转/秒,它根据我的数据,计算结果如下: 整个曲线运行时间158秒 加速时间8秒 减速时间8秒 途中保持在800转/分的速度共142秒 整个过程共2000转 加速过程共53.3333转 减速过程共53.3333转 中间运行1893.3333转。其中小数点后面的精度,由编码器得出。。。启动这条index,它就会严格按照所计算的所有数据运行。。。最终误差,0.0001.。。。 程序里可以设置无数条这样的index,这些index可以通过编程,互相组合叠加,嵌套,完成复杂操作。。。看明白了么?? 呵呵呵,当然,这个运动,只相当于上图的2号,更高级的可以生成4号的运行曲线,并且严格按照所计算的数据运行。。。。这个更复杂点。。。就先不说了。。呵呵。。
这还专业??!!
只能说你见过的产品太少了?
你那个图里的东西很容易做, 跟驱动器的核心技术一点都没有关系!
国内的产品都有这个功能, 叫内部位置节点控制!
爱默生的伺服没用过, 论运动控制及驱动器, 你找个西门子的产品看看吧!
爱默生有什么?
数控系统有吗? 多轴控制器有吗? 高性能驱动器有吗?。。。。。。
- 第一次循环标志位是什么
 [6202]
[6202] - 前台小姐竟能用英语逼死美国...[2161]
- IAI电缸MODBUS通讯资料(中文...[2960]
- (已结束)Moxa以太网周擂台第...[3413]
- 西门子、威纶通、昆仑通态、台达...[8605]
- step7下载不了模块[3067]
- 车牌识别系统的使用方法及系...[1900]
- [公共基础] 注册电气工程师公...[2213]
- 小型PLC的利器——台达DVP-14S...[17711]
- 电气原件及控制图动画[8059]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
