从伺服工作的基本原理来解析编码器信号处理的过程 点击:8691 | 回复:248

一、上面的是征提供的欧系某款驱动器的编码器信号处理框图;
二、我从伺服工作的基本原理来解析编码器信号处理的过程:
引用 东山脚下-骑士军团 的回复内容:这就是典型的闭环控制系统的基本原理
1、这就是典型的闭环控制系统的基本原理 ;
2、通常我们说编码器的刻线数,是指一条刻线的刻线数,例如说,这个编码器的刻线数是1024;
3、那我们会马上意识到,这个编码器的解析度最大就是1024×4=4096;
4、我们还会知道,这个编码器周反馈脉冲数有三种可以由用户选用1024、2048、4096;
5、这个图中有两个计数器,一个是编码器反馈脉冲的计数器,也是伺服当前实际位置的计数器,即图中Free-running position counter,他的读数就是伺服当前的实际位置;
6、另一个计数器就是最右边的N0.of signal period,这个计数器就是指令脉冲计数器,用户输入的指令脉冲数就储存在这个计数器中,伺服运行中,它的读数就是距离目标控制位置或者简单说距离终点的指令脉冲数;
7、这两个计数器的读数是互补的,就是说他们的读数的和,等于伺服运行全程的指令脉冲数;
8、这个典型的闭环控制系统中,还有一个非常重要的乘法器multiplication by hardware ;
9、乘数x 2^n,,它的倒数I/2^n就是我们平时说的电子齿轮比;
10、它是联系两个计数器的纽带,就是人民币与美元的换算率;
11、编码器周反馈脉冲数×2^n=周指令脉冲数
电子齿轮比=1/2^n=编码器周反馈脉冲数/周指令脉冲数
12、伺服的一个控制过程,就是当前位置反馈脉冲计数器的读数,由零到终点位置的读数;
13、伺服的一个控制过程,就是目标位置指令脉冲计数器的读数,由起点指令脉冲数到终点位置的零读数;
14、关于 Fine resolution 高分辨率高解析度脉冲数,它是1个n位数,等于n-1、n-2、…、0;
15、这个n位数的脉冲数等于指令脉冲数÷2^n的余数,例如
1)周指令脉冲数65536;
2)编码器周脉冲数=4096;
3)2^n=16,即 周指令脉冲数65536=编码器周脉冲数4096×2^n
4)指令脉冲数=65536λ
5)Fine resolution脉冲数=65536λ÷16的余数,是1~15个,n=4;
14、关于 Fine resolution 高分辨率高解析度脉冲数,它是1个n位数,等于n-1、n-2、…、0;
15、这个n位数的脉冲数等于指令脉冲数÷2^n的余数,例如
1)周指令脉冲数65536;
2)编码器周脉冲数=1024;
3)2^n=64,即 周指令脉冲数65536=编码器周脉冲数1024×64
4)指令脉冲数=65536λ
5)Fine resolution脉冲数=65536λ÷64的余数,是1~63个,n=6;
16、征说“Fine resolution 部分: 对4倍频的光电编码器而言,这个位域占用两位”,是不懂装懂,压根就不知道是怎么回事!
17、征说“2~31的数值是由计数器对倍频的信号自动累加得来的,这一部分表示电机转过的线数。对1024线编码器, 计数范围最大为 2^30/1024 = 1048576 圈”;
18、这个计算用1024就是错误的,应该用4096×16=65536,去除2~31的数值,即
2^30/65536 = …… 圈;
19、就这个伺服位置闭环图,征从前到后,犯了多少错?表现出对控制原理完全不懂,表现出数量关系不清楚,征得表述就是胡说八道!
三、同时转征对该图的解析如下:
还是费点功夫简单讲解一下, 以光电编码器为例:
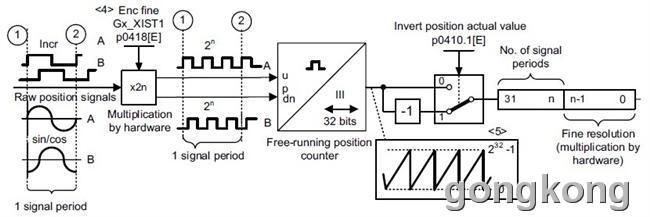
1) 左侧的 1 2 图
表示的1 signal period , 表示的是光电编码器的一线输出的AB信号。光电编码器有多少线, 其旋转一周就输出多少个这样的脉冲。这个信号是随着电机转动连续输出的,在一个时刻看AB波形,你不知道电机转在哪个位置上, 只有AB信号的电平情况。
2)multiplication by hardware
图中的x2n, 实际上是错的, 应该是x 2^n, 这属于手册的编写错误
表示的是硬件对AB信号进行倍频, 即细分。对光电编码器就是4倍频, 即n = 2。
光电编码器的AB一个周期即1 signal period 经硬件4倍频后得到4个脉冲,四倍频就是对AB脉冲进行边沿检测。
3)中间的1 2
表示1 signal period 四倍频后得到的信号
4)Free-running position counter
表示的是位置计数器
这个位置计数器是由硬件来实现的, 由硬件根据3)中的脉冲序列来进行加减计数的。
计数方向即 加计数或减计数是由 AB信号的先后顺序决定的。不清楚的可以去百度搜搜, 就清楚了
5) P0410.1
是配置参数, 是否需要对计数器进行取负, 载调试时根据需要选择是否启用。
6) 最右侧32位的计数值部分
4)中的计数器对4倍频后的脉冲计数,一个脉冲一个脉冲进行记录,
Fine resolution 部分: 对4倍频的光电编码器而言,这个位域占用两位
实际的计数过程如下:
电机转动时,1)中的信号高低高低的连续变化, 经2)硬件4倍频后, 得到一系列的边沿检测后输出(即硬件4倍频)的脉冲信号3),这些脉冲由4)的计数器自动从最低位加减计数。最后得到一个计数值。
如果对这个计数值分析, 低2位表示细分的信号, 2~31位表示的编码器的原始信号。
但请注意一点, 2~31的数值是由计数器对倍频的信号自动累加得来的,这一部分表示电机转过的线数。
对1024线编码器, 计数范围最大为 2^30/1024 = 1048576 圈,如果电机以3000rpm转动, 保证电机转动1048576/3000 = 349.52533333333333333333333333333 分钟, 即大于这么长的时间后计数器翻转, 自动从0开始计数
在位置控制时, 需要的是这个32位计数器的整体数值,不会区分那一部分。
以上是对我提供的图的简要分析, 或者是一个我说明!







引用 笨鳥慢飛 的回复内容: 周指令脉冲数=65536,那么电机的转数要<65536转這是什麼概念 若輪切的圓周算300mm=0.3m 那此輪切的線速度 0.3*60sec*65536 呵呵 跑的比飛機還快 這就是你的東 我看是找不到北跟你辨論能算辯論嗎 玩遊戲都需遵守遊戲規則 你呢 完全不遵守 跟你辨有意義嗎 哎 傷心又傷身 浪費生命 你喜歡"毀人不倦" 關我屁事
1、周指令脉冲数=65536个,那么电机的转数要<65536周;
2、如果电机的周(转)数等于或大于65536周(转),指令脉冲数=65536×65536个;
3、32位计数器只能计65536×65536-1个脉冲;
4、这样指令脉冲计数器溢出,指令脉冲数变为0000……0001个;
5、我说的就是上述概念,笨鸟说的“輪切的線速度 0.3*60sec*65536 呵呵 跑的比飛機還快 ”,把65536转当做65536转速;
6、所以,我说的是“东”,笨鸟说的是“西”,牛头不对马嘴!
7、这就是我和笨鳥慢飛的辩论!
- 电气自动化专业英语教材
 [2340]
[2340] - “球磨机”是什么性质的负载?到...[3963]
- 转求助帖:请问伺服电机的传递...[8396]
- 这台冲压机器人比国产六轴机...[1787]
- 变频器翻译成英文是inverter...[24278]
- 电工电路模拟软件 0积分[2481]
- 自动控制常用词汇(自我总结)...[2819]
- 我总结的一些plc专用词汇[5467]
- 二线制,三线制,四线制热电阻...[21097]
- 我翻译的HART275操作手册(全...[3072]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
