发那科六轴机械手码垛实例笔记 点击:421 | 回复:1

发那科六轴机械手码垛实例笔记
这次码垛的目标是一个6*3*1的测试工装板,利用一体式两段气缸,配合拧紧工具,对每个工位进行拧紧
如下图,刚开始程序肯定进行复位,等待位
检测原位传感器,然后置位一级气缸,使吸钉管到吸钉位,打开吸真空阀,检测压力传感器是否满足,如果有就保持,下一步到码垛程序
如下图,按F1指令,添加码垛指令,有4种类型
PALLETIZING B_i --对应所有工件的姿势一定,堆上时的底面(最底下的面)形状为直线(工件都在xyz一直线上),或底面为平行四边形的情形,堆积模式简单,路径模式一种
注解:路径模式指的是码垛时的接入点以及逃点的路径,设定时一般设定一个点,系统会自动计算其他点位的接入点及逃点,仅针对一种路径的情况
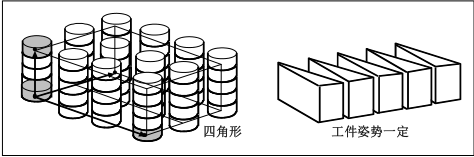
PALLETIZING BX_i -- B_i的升级版,都是针对堆积模式简单的码垛,但是这种提供多种路径模式多种
PALLETIZING E_i -- 堆积模式较为复杂,路径模式一种,工位没有在XYZ的一条直线上,当然也能兼容B的码垛功能,也能使用在堆积模式简单的情况
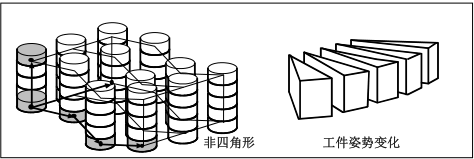
PALLETIZING EX_i--针对E_i的升级版,当需要多种路径模式,并且堆料模式复杂的情况
3.1 如下图,这里设置的是PALETIZING_1[B]_1(1代表的是码垛堆积编号(码垛寄存器),可以设置1-16个码垛模型),具体设置属性如下:
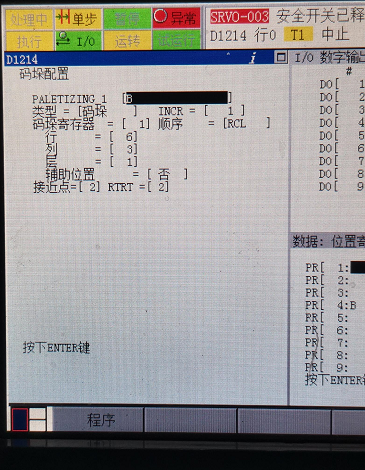
类型:码垛和拆垛,堆上堆下
INCR:每隔几个堆,是一个一个依次堆,还是隔几个堆
码垛寄存器:不能设置相同的寄存器
顺序:按照先行再列再层,还是其他顺序,RCL代表行列层的顺序
行:每行有几个工位点
列:每列有几个工位点
层:一共有几层
辅助位置:一般针对底面为梯形的情况,这时要多定位一点,梯形的话只能用E,EX指令
接近点数量,RTRT(逃点数量)
设置好后,按F5完成
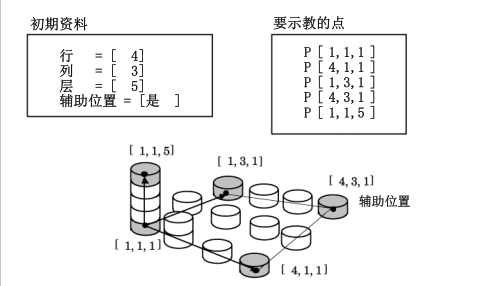
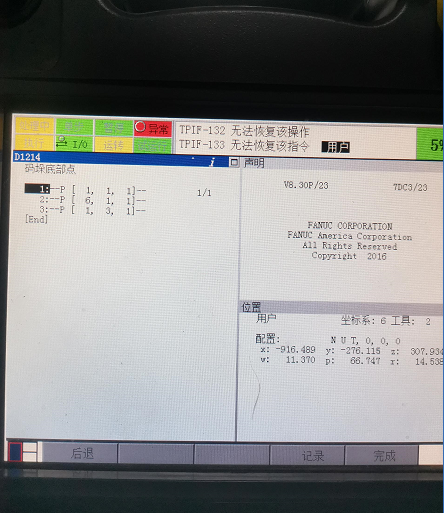
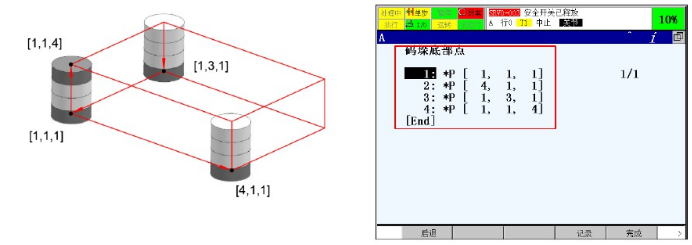
出现如下画面就是设置底部,因为设置的是一层的底面为长方形,所有测长方形测4个角的点,如果是多层的,要测一个角的点,然后基于这个点,y向Z向x向的3个点,如果是梯形要加个辅助位置点位,下图中1#点P[1,1,1]代表XYZ的第一个原点,2#点[6,1,1]代表X行数的第六个(因为行是设置的6,6就是X最边上一个点),Y列数的第一列,Z层数的第一层,3#点就代表第一行第三列第一层的一点
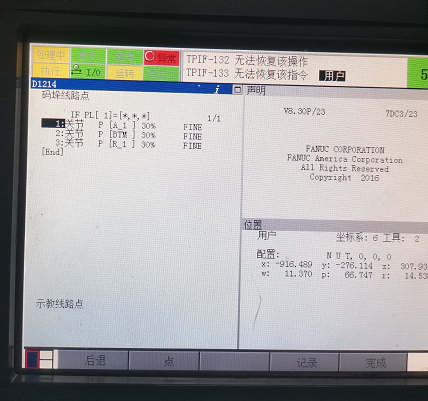
5. 当设置好底部后,接下来就要设置码垛路径,如下图,这是唯一路径的设置画面,因为比较简单,只要设置3个点,A_1为接入点,BTM为堆上点(堆上点就是在工位点的上方而底部点则在工位内侧,比如拧紧,底部点应该在螺纹孔上方平面之下,而堆上点应该在平面之上),R_1为逃点,这里比较简单,逃点跟堆上点可以设置成1个坐标,路径设置好后,码垛指令就设置好了,接下来看看实际应用
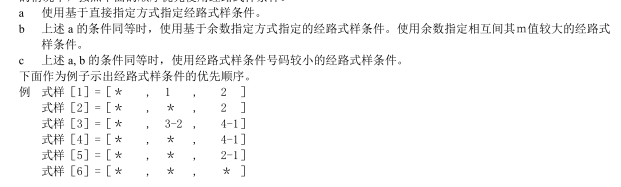
5.1 针对多式样路径的,会有如下的式样设置
式样1:是直接指定式样,针对的是第一列,第二层的点位用式样1的方式
式样2:是直接指定式样,针对是第二层所有XY向点位,用式样2的方式
式样3:是余数指定式样,针对当前列数除以3余数为2的列(如0*3+2=2,1*3+2=5,2*3+2=8),当前层数除以4余数为1的层数(如0*4+1=1,5,9),用式样3的方式
式样4:是余数指定模式,针对当前层数除以4余数为1的层(如1,5,9),针对这些层数所有XY向工位
式样5:同式样4,他针对的是(1,3,5层)
式样6:是任意路径
优先顺序:指定优先》余数指定(M值大的优先)
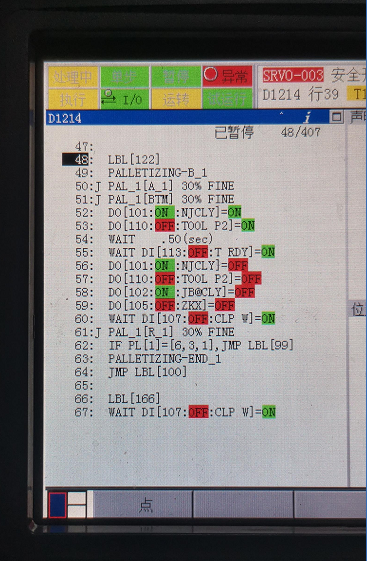
6. 如下图,当程序进入122标签,开始码垛程序,先进入A_1的接入点,然后到BTM堆上点,拧紧气缸和工具置位,等待500ms和拧紧完成信号,复位气缸和工具,等待原位传感器信号,然后移动到R_1的逃点,IF PL[1]=[6,3,1],JMP LBL[99]这句话一定要放到END_1之前,不然程序会默认加1,到下一个点,这里来判断是否是最后一点,如果是就复位PL[1]=[1,1,1]初始化为1#点





楼主最近还看过
- 哪里有ABB机器人培训
 [1240]
[1240] - 请教如何更好的理解机器人工...[14168]
- ABB机器人视频教程二[1141]
- 分享ABB机器人的资料了[2188]
- 我有一台ABB的机器人啊!一直...[1222]
- FANUC机器人GSD文件——最新[2405]
- 机器人制作天空宝典[2249]
- 精品电子书-工业机器人实操与...[12068]
- 上海傲卡自动化科技有限公司...[4760]
- 第一讲 第三节 ABB机器人示教...[36759]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
