库卡框架连接运算规则 点击:866 | 回复:11







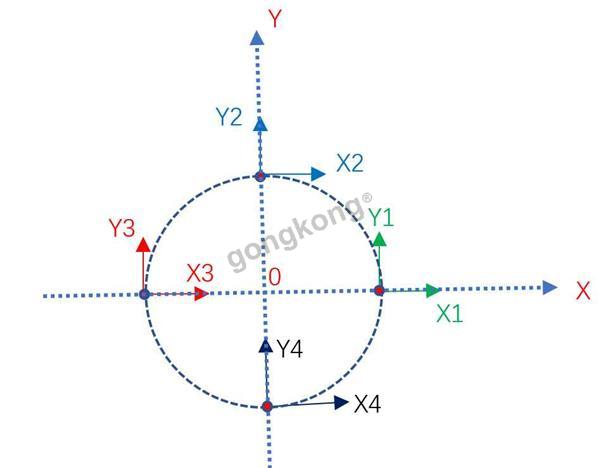
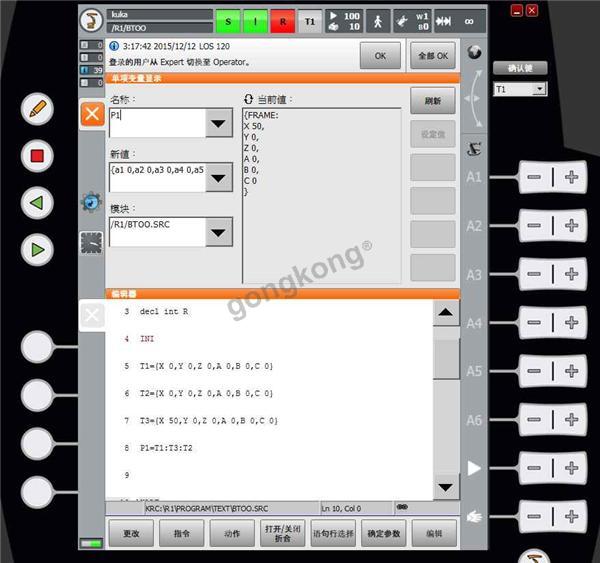
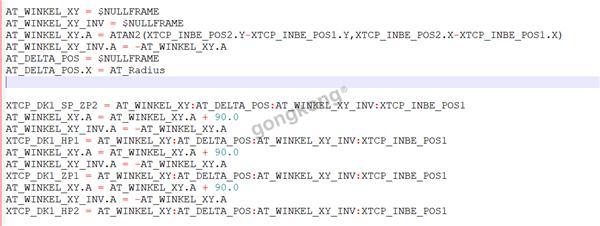 你看一下这个程序,程序目的是以P1点为圆心,计算出画一个以AT_Radius为半径的圆的四个点。P1与P2是在同一TOOL同一BASE的两个点。这个程序是可以正确运行的。然而以这种方式去理解的话就有问题
你看一下这个程序,程序目的是以P1点为圆心,计算出画一个以AT_Radius为半径的圆的四个点。P1与P2是在同一TOOL同一BASE的两个点。这个程序是可以正确运行的。然而以这种方式去理解的话就有问题


热门招聘
相关主题
- 求购ABB机器人电机都是输出齿...
 [928]
[928] - ABB机器人robotstudio、robot...[948]
- 库卡点焊修磨[1428]
- ABB机器人PCinterface[942]
- 国产的电动汽车怎么样呀,现在...[2123]
- OTC弧焊机器人外接信号问题[808]
- ABB工业机器人的运动线性运动...[15374]
- 大电机维修,实在好玩好玩,比...[897]
- 国内外工业机器人厂商[5179]
- RobotStudio软件[3732]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
