ABB工业机器人的运动线性运动和重定位运动操作说明——ABB机器人 点击:20644 | 回复:1

ABB工业机器人的运动单轴运动,线性运动和重定位运动 操作说明——ABB机器人
ABB工业机器人的运动方式包括:单轴运动,线性运动和重定位运动 。着重说ABB机器人的线性运动和ABB机器人重定位运动两种操作方式的操作方法及注意的事项。
一般地,ABB机器人是由六个伺服电动机分别驱动机器人的六个关节轴,那么每次手动操纵一个关节轴 的运动,就称之为单轴运动。机器人的线性运动是指安装在机器人第六轴法兰盘上工具的TCP在空间中作线性运动。3.重定位运动机器人的重定位运动是指机器人第六轴法兰盘上的工具TCP点在空间中绕着坐标轴旋转的运动,也可以理解为机器人绕着工具TCP点作姿态调整的运动。
线性运动的手动操纵机器人的线性运动是指安装在机器人第六轴法兰盘上工具的TCP在空间中作线性运动。以下就是手动操纵线性运动的方法
单击“动作模式”
自选择“线性”,然后单击“确定”。
单击“工具坐标”机器人的线性运动要在“工具坐标”中指定对应的工具。
选中对应的工具“tool1"
用左手按下使能按钮,进入“电动机开启”状态
在状态栏中,确认“电动机开启”状态。
显示轴X、Y、Z的操纵杆方向。黄箭头代表正方向。
操作示教器上的操纵杆,工具的TCP点在空间中作线性运动。
选中“增量”。
如果对使用操纵杆通过位移幅度来控制机器人运动的速度不熟练的话。那么可以使用“增量”模式来控制机器人的运动。在增量模式下,操纵杆每位移一次,机器人就移动一步。如果操纵杆持续一秒或数秒钟, 机器人就会持续移动(速率为10步/s)。根据需要选择增量的移动距离,然后单击“确定”。
重定位运动的手动操纵机器人的重定位运动是指机器人第六轴法兰盘上的工具TCP点在空间中绕着坐标轴旋转的运动,也可以理解为机器人绕着工具TCP点作姿态调整的运动。以下就是手动操纵重定位运动的方法。
选中正在使用的“tool1",然后单击“确定”。
用左手按下使能按钮,进入“电动机开启”状态。
在状态栏中,确认“电动机开启”状态。
显示轴X、Y、z的操纵杆方向。黄箭头代表正方向。
操纵示教器上的操纵杆,机器人绕着工具TCP点作姿态调整的运动
单击此快捷菜单按钮。
单击“手动操纵”按钮。
单击“显示详情”展开菜单。
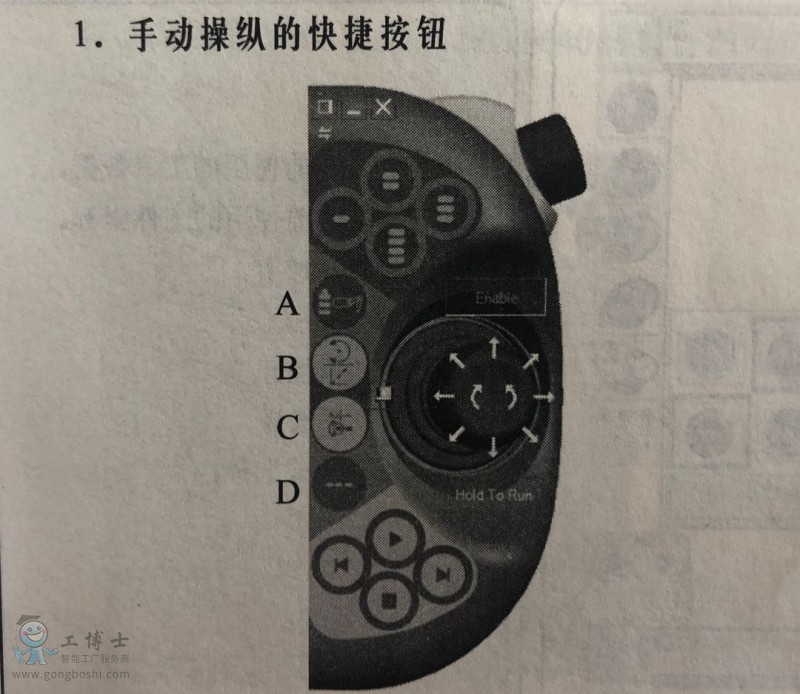
A机器人/外轴的切换。B线性运动/重定 位运动的切换。C关节运动轴1-3/轴4-6的切换。D增量开/关。
更多ABB机器人技术支持网站:http://abb_robots.gongboshi.com/
ABB机器人更多实用操作技能请点击:ABB机器人





- 数控机床机器人装夹说明
 [843]
[843] - 辰星(天津)自动化设备有限公...[1362]
- ABB离线仿真软件RobotStudio...[4124]
- 上海傲卡自动化科技有限公司...[4760]
- 求助:工业机器人在汽车后视镜...[796]
- KUKA机器人焊接[1187]
- 大家如何看待 日本爱普生机器...[928]
- 机器人滚边技术浅析[4322]
- 步进电机在机器人关节驱动上...[2283]
- 同步电机的工作原理,可以改善...[2314]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
