松下A4伺服驱动器 点击:787 | 回复:15






发表于:2018-01-03 09:54:43
2楼
发表于:2018-01-03 10:01:06
3楼
发表于:2018-01-03 10:15:29
5楼
发表于:2018-01-03 10:23:45
6楼


 在A4驱动器是哪一个参数。我只会用A5的, A4的不太会。就这一个参数没找到。求大神指点。
在A4驱动器是哪一个参数。我只会用A5的, A4的不太会。就这一个参数没找到。求大神指点。


发表于:2018-08-03 10:38:43
14楼
位置控制模式:
Pr 40,41,42,对应值 0,1 or 0,3, 分别为脉冲输入形式,电机旋转方向,脉冲方式。
Pr 43,设为1,屏蔽脉冲输入禁止信号。
Pr 02,设为0,位置模式;
Pr 03,设为1,屏蔽转矩限制;
Pr 48,设为10000,电子齿轮比分子;
Pr 4b, 5000, 分母(考虑丝杠螺距为 5mm)
速度控制模式:

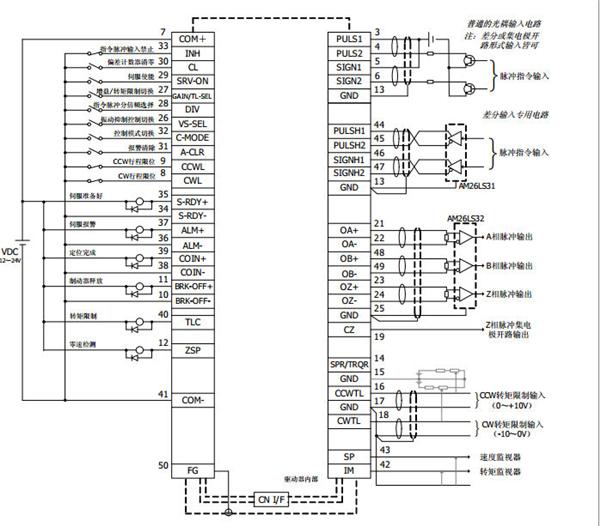
上图中一般必须用的是36/37(伺服驱动器报警信号),29(伺服使能信号),7/41(DC 24v),21/22、48/49、23/24(提供位置反馈给上位系统),14/15(来自系统的速度指令电压)。
参数设置:

热门招聘
相关主题
- 对于伺服驱动器的位置控制脉...
 [9171]
[9171] - 请教采用通讯方式与采用运动...[5965]
- 簡易探討運動控制三大控制模...[9413]
- 伺服培训内部资料放出[10511]
- 步进与伺服学习笔记[11014]
- 关于伺服偏差计数器清零的问...[17377]
- 关于插补周期[5438]
- 请教各位师傅带刹车的电动机...[5708]
- 求助:伺服的陷波滤波器![9899]
- 步进电机的电源如何选?相电流...[20796]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
