【正运动技术】二维螺距补偿 点击:228 | 回复:0

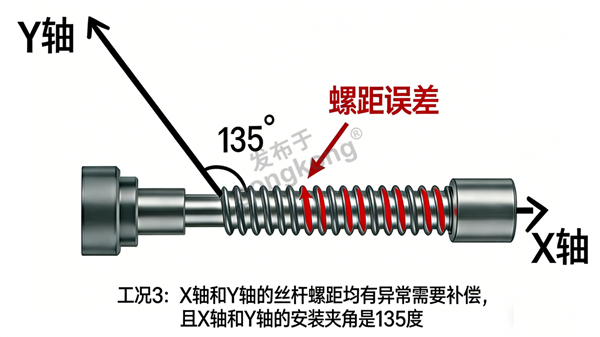
假设工况3:X轴和Y轴的丝杆螺距均有异常需要补偿,且X轴和Y轴的安装夹角是135度。
假设X轴的激光干涉仪数据如下:
'运动到1mm处,激光干涉仪打出来实际是0.9mm处,所以需要补偿的脉冲 = 0.1*units
'运动到2mm处,激光干涉仪打出来实际是1.8mm处,所以需要补偿的脉冲 = 0.2*units
'运动到3mm处,激光干涉仪打出来实际是2.7mm处,所以需要补偿的脉冲 = 0.3*units
'Y轴丝杆工况和X轴丝杆工况类似
步骤一:
规划起始补偿点,补偿间距,补偿的行数和列数。
'初始化二维螺距补偿的相关参数
TableId = 1000 '补偿数据的Table起始点
StartMposX = 0 'X轴开始补偿的位置
StartMposY = 0 'Y轴开始补偿的位置
DisX = 0.5 'X轴方向补偿的间距
DisY = 0.5 'Y轴方向补偿的间距
ColNumX = 50 'X轴方向补偿的点数
RowlNumY = 50 'Y轴方向补偿的点数
步骤二:
根据该工况的测试环境,计算各个补偿点的X方向和Y方向的改补偿的脉冲数,并更新到TABLE。
'假设X轴的激光干涉仪数据如下:
'运动到1mm处,激光干涉仪实际是0.9mm处,所以需要补偿的脉冲 = 0.1*units
'运动到2mm处,激光干涉仪实际是1.8mm处,所以需要补偿的脉冲 = 0.2*units
'运动到3mm处,激光干涉仪实际是2.7mm处,所以需要补偿的脉冲 = 0.3*units
'Y轴工况和X轴工况类似
'更新该工况下二维补偿表的TABLE数据
FOR i=0 to RowlNumY-1
'先按行填写该行的每一列的数据
FOR j=0 to ColNumX-1
'【工况三:XY轴螺距异常,XY的夹角是135度】
'X轴螺距有问题,实际是10000个脉冲跑0.5mm
'Y轴螺距也有问题,实际是10000个脉冲跑0.9mm
IF i=0 and j=0 THEN
Angle=135'XY轴的安装夹角
ENDIF
LOCAL ActPosX,ActPosY '实际位置
'X轴补偿数据
ActPosX = 0.5*(j+1)+ (i+1)*0.9*(COS(Angle*PI/180))
Table(TableId+2*(i*ColNumX+j)) = DisX*((1+j)-ActPosX)*UNITS(AxisX)
'Y轴补偿数据
ActPosY = 0.9*(SIN(Angle*PI/180))
Table(TableId+2*(i*ColNumX+j)+1) = DisY*(1+i)*(1- ActPosY)*UNITS(AxisY)
NEXT
NEXT
步骤三:
调用二维螺距补偿指令启用二维螺距补偿功能。
'开始2D螺距补偿
WAIT IDLE
PITCH2SET(1,StartMposX ,StartMposY,DisX,DisY,ColNumX,RowlNumY,TableId)
步骤四:
发送运动指令,根据实际的编码器反馈来验证控制器实际上发的脉冲数是否正确。
'开始运动
MoveTest(1,1,RunMode)
MoveTest(2,1,RunMode)
MoveTest(2,2,RunMode)
步骤五:
验证效果。(PS:x轴和Y轴的脉冲当量均设置的是100000)
根据以上数据启用二维螺距补偿功能后,运动到点【1,1】时,根据实际发的脉冲数推算出实际运动的位置是【0.99999,0.99999】和【1,1】的脉冲误差也是在一个脉冲以内,所以二维螺距补偿功能正常。
MoveTest函数的实现: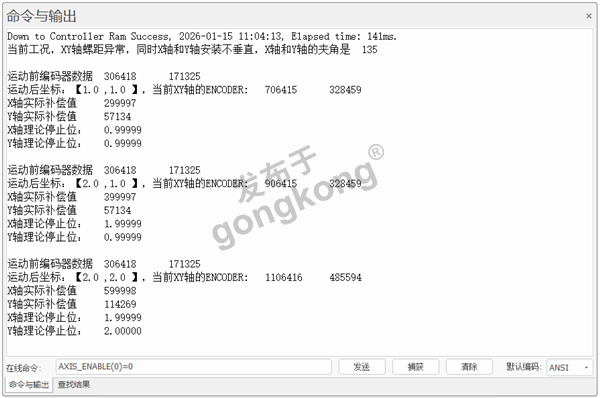
GLOBAL SUB MoveTest(Pos1,Pos2,RunMode)
MOVEABS(Pos1,Pos2)
DELAY(1500)
?"运动前编码器数据",TempVarX,TempVarY
?"运动后坐标:【"+TOSTR(Pos1,4,1)+","+TOSTR(Pos2,4,1)+"】,当前XY轴的ENCODER:",ENCODER(AxisX),ENCODER(AxisY)
?"X轴实际补偿值",ENCODER(AxisX)-TempVarX-DPOS(AxisX)*UNITS(AxisX)
?"Y轴实际补偿值",ENCODER(AxisY)-TempVarY-DPOS(AxisY)*UNITS(AxisY)
IF RunMode=0 THEN '工况1
?"X轴理论补偿值",-POS2*(COS(Angle*pi/180)/SIN(Angle*pi/180))*UNITS(AxisX),'"和实际有差值,可能是脉冲当量的问题"
?"Y轴理论补偿值",POS2*(1/(SIN(Angle*pi/180)) -1)*UNITS(AxisY),'"和实际有差值,可能是脉冲当量的问题"
ELSEIF RunMode=1 THEN '工况2
?"X轴理论补偿值",POS1*0.1/0.9*UNITS(AxisX),'"和实际有差值,可能是脉冲当量的问题"
?"Y轴理论补偿值",POS2*0.1/0.9*UNITS(AxisY),'"和实际有差值,可能是脉冲当量的问题"
ELSEIF RunMode=2 THEN '工况3
?"X轴理论停止位:",((ENCODER(AxisX)-TempVarX)*0.5 +(ENCODER(AxisY)-TempVarY)*0.9*COS(Angle*pi/180))/UNITS(AxisX)
?"Y轴理论停止位:",((ENCODER(AxisY)-TempVarY)*0.9*SIN(Angle*pi/180))/UNITS(AxisX)
ENDIF
ENDSUB





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
