【正运动技术】机械手问题(五) 点击:219 | 回复:0

发表于:2025-06-09 16:27:42
楼主
问题描述:机械手模式下运动一开始正常,在运动到某一个节点处突然有抖动
排查原因:在逆解状态下进行运动,在运动没有结束的情况下直接切换机械手模式再下发其他运动指令。
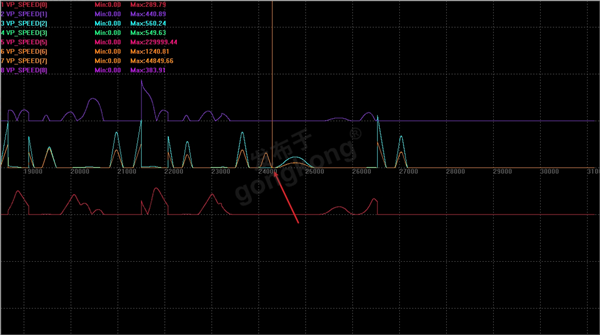
解决方案:切换机械手模式的时候,对轴状态进行判断。在轴停止的情况下再进行切换。
注意事项
1.机械手叠加,机械手模式是可以叠加的,前面的机械手虚拟轴是后一个机械手的关节轴,依此设置table参数并connframe/connreframe连接。
2.Scara机械手实际测试过臂展4米的结构,重复定位精度在5个丝以内。
3.机械手调试确定大概的一圈脉冲数,先将dpos=0,然后通过手动运动使某个轴旋转90°(大概值),然后再看dpos此时的值,那么一圈脉冲数大约=(90/dpos)*units。





楼主最近还看过
热门招聘
相关主题

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
