EtherCAT转CANOPEN配置秘籍!汇川PLC快速上手 点击:355 | 回复:0

EtherCAT转CANOPEN配置秘籍!汇川PLC快速上手
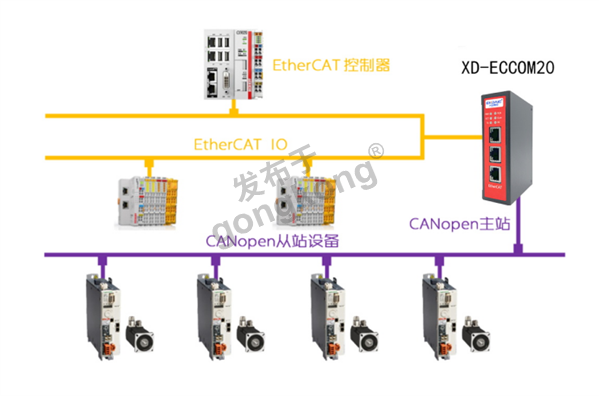
在工业自动化领域,通信协议的多样性既是技术进步的象征,也给系统集成和设备兼容性带来了不小的挑战。EtherCAT转CANOPEN就是两种广泛应用于不同场景的通信协议,它们各自拥有独特的优势。本文旨在通过一个具体案例——汇川PLC上从EtherCAT转CANOPEN的快速配置,来探讨这两种协议之间的转换过程,以及如何利用这一技术解决实际工程中的问题。

我们需要了解EtherCAT和CANOPEN的基本概念。EtherCAT是一种高性能、实时以太网通信协议,广泛应用于需要高速数据传输的工业自动化系统中。而CANOPEN则是一种基于CAN总线的高层协议,以其简单、可靠的特点,在汽车电子、医疗设备等小型控制系统中得到广泛应用。虽然两者都属于工业自动化领域的主流通信协议,但由于其底层机制和应用环境的不同,直接进行通信存在诸多不便。
在本案例中,我们的目标是实现汇川PLC对EtherCAT设备的控制,并将其转换成CANOPEN协议输出。这要求我们不仅要掌握两种协议的工作原理,还需要熟悉汇川PLC的配置方法和相关工具的使用。
接下来,我们将详细介绍这一配置过程
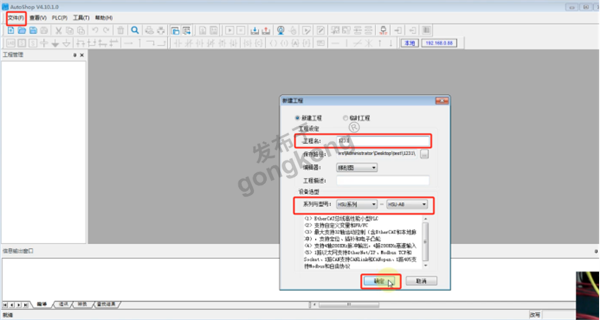
1、打开汇川plc编程软件,点击文件 新建项目,给项目命名 选择plc型号点击确认:
2、进入项目后在右侧工具箱右击EtherCAT Devices导入XML文件,导入成功后重启软件生效:
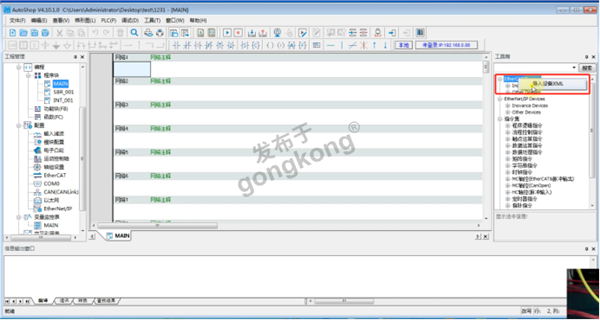
3、重启软件后找到安装好的XML文件双击添加到主站下面:
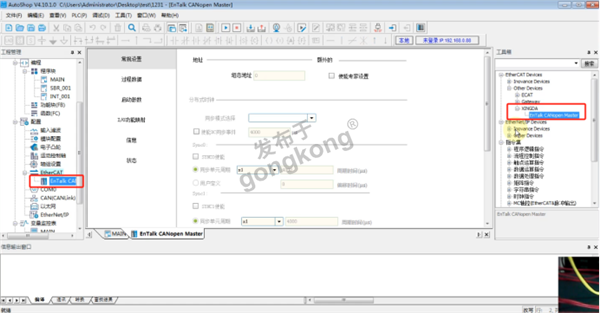
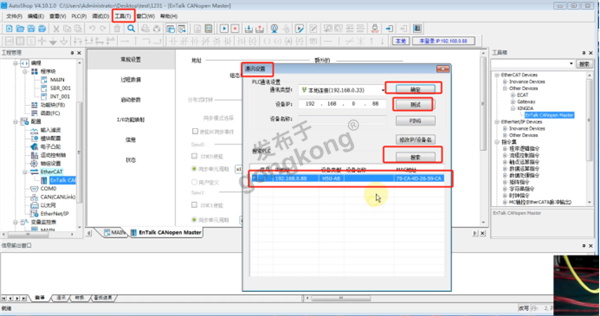
4、在“工具”找到通讯设置,点击搜索选中搜索到的设备,点击测试:
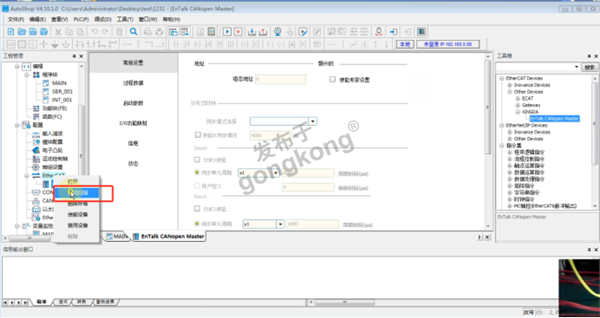
5、右击EtherCAT找到自动扫描,进入窗口后点击开始扫描:
6、双击进入XML文件点开过程数据,删除多余的输入 输出指令:

7、删除完以后点击增加新的指令根据PDO的位长度选择对应的指令:
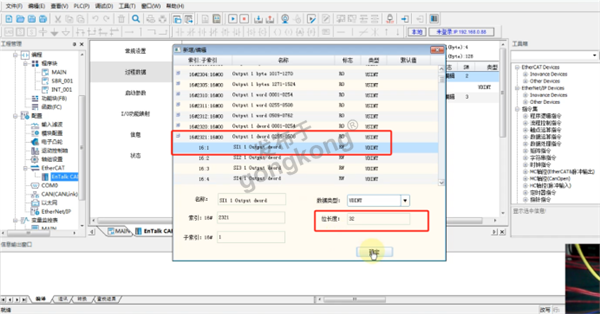
8、根据PDO来添加数据映射(要与CANopen Configuration Studio配置软件保持一致):

9、添加完成后点击下载:
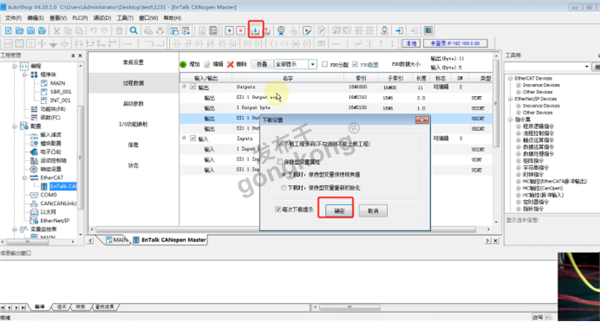
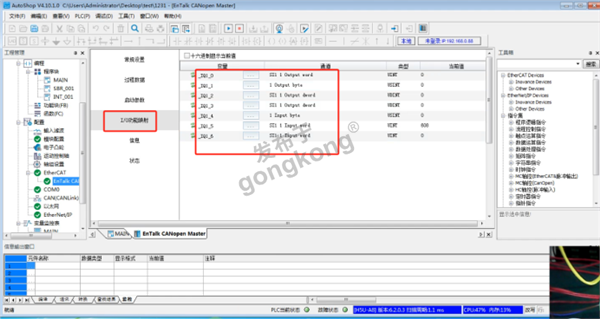
10、下载完成后来到I/O功能映射,在线观察电机运行状态:
通过本案例的学习,我们不仅可以掌握从EtherCAT转CANOPEN转换的具体步骤和方法,还可以了解到在实际工程项目中如何处理通信协议转换带来的挑战。这对于提高自动化系统的集成效率和降低维护成本具有重要意义。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
