EtherCAT转Modbus在modbus侧作为主站实现与倍福plc数据互通 点击:178 | 回复:0

EtherCAT转Modbus在modbus侧作为主站实现与倍福plc数据互通
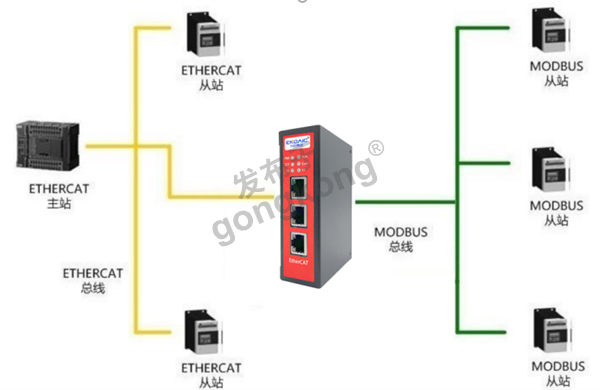
在工业自动化领域,不同设备和控制器间的高效、稳定通信是确保生产线顺畅运行的关键。随着技术的不断发展,各种通信协议被广泛应用,其中EtherCAT和Modbus是两种常见的工业通信协议。它们各有优势,但在实际应用中,经常需要将两者结合起来使用。本文将详细介绍如何通过EtherCAT转Modbus网关,实现Modbus侧作为主站与倍福PLC数据互通的方法与应用。

EtherCAT转Modbus网关的主要功能是在不同通信协议之间进行数据转换和传输。具体来说,这种网关可以在Modbus侧作为主站,与EtherCAT网络中的设备进行数据交换。通过配置网关,可以实现Modbus主站对EtherCAT从站的数据读写操作,从而实现数据的双向互通。
以下是具体操作步骤:
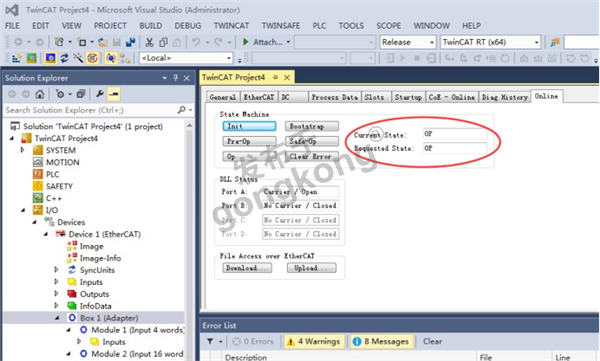
1、运行 ETHERCAT 主站软件,点击 Restart TwinCAT(Config Mode),使
ETHERCAT 主站软件运行。

2、主站与网关建立 ETHERCAT 通讯后,可以在 TWINCAT 软件的 ONLINE 页面下看到“OP”状态,说明主站与网关成功建立 ETHERCAT 连接,同时网关 ETHERCAT 接口的指示灯由红灯变为黄灯。
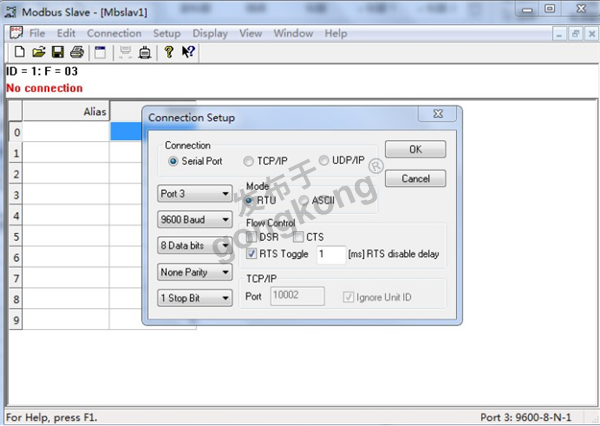
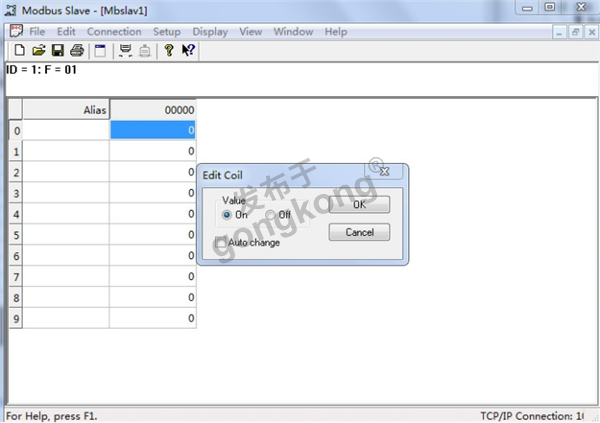
3、使用 Modbus Slave 软件做为从站,与网关的 RTU 端子连接进行测试。
点击软件的菜单栏“Connection——Connect…”,设置正确的端口号,然后点击 OK,开始运行。如下图:
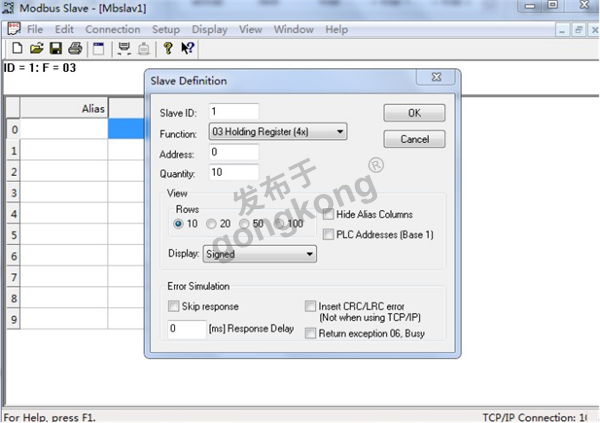
4、点击软件的菜单栏“Setup——Slave Definition”,设置从站允许访问的数据区,如下图:
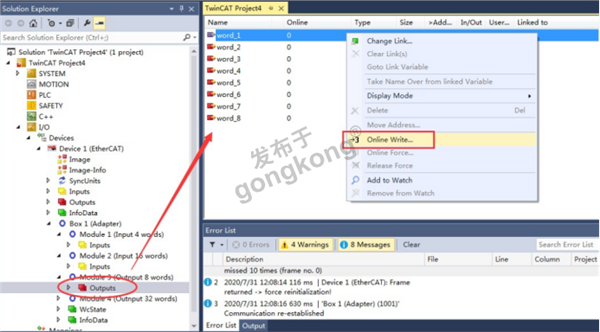
5、在 ETHERCAT 主站软件上,在左侧项目树中点击第一条 Output,在主窗口中,右键单击某个数据,选择 Online Write,可以修改实时的数据值。
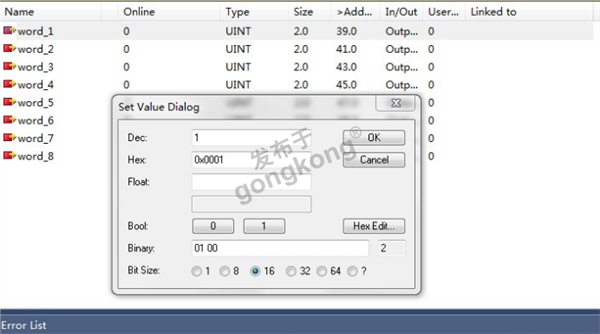
6、将输出数据的第 1 个 word 赋值为 1(控制字=1),此时 MODBUS-RTU 开始通讯。
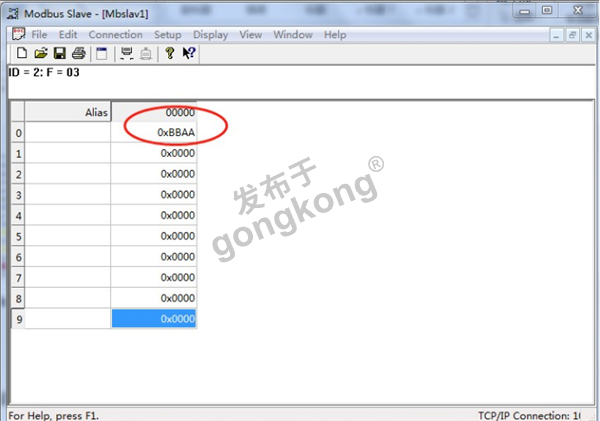
7、网关配置的第一个字节是读线圈,我们在 Modbus Slave 软件中,手动修改线
圈的状态,如下图:
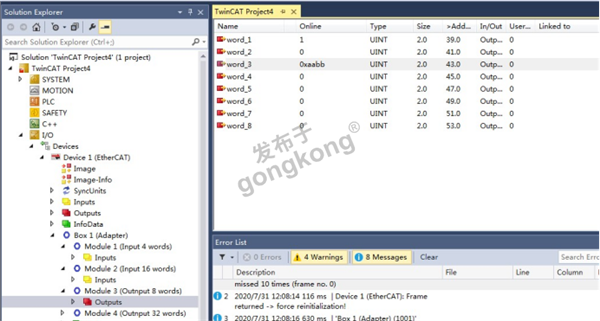
8、可以在 TWINCAT 软件中监控到第一个上传数据,改变为 1,数据修改成功。

9、在 TWINCAT 软件上手动修改一个 output 数据值,如下图:
10、在 Modbus Slave 软件中可以监视到,数据已经成功下发。
EtherCAT转Modbus网关在工业自动化中的应用极大地提高了不同设备和系统之间的互操作性。无论是将Modbus设备接入EtherCAT网络,还是将EtherCAT设备连接到Modbus总线,都可以通过简单的配置实现。这不仅节省了开发时间和成本,还提高了系统的稳定性和可靠性。在未来的工业自动化发展中,这样的技术将会更加普及,为各种工业应用提供强有力的支持。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
