【求助】SCARA四轴机械手原点回归不到0 点击:1199 | 回复:5






楼主最近还看过

可能原因分析:
1. 机械结构问题
机械磨损和松动:长期使用和不良维护可能导致机械部件磨损和松动,影响定位精度。特别是3轴和4轴,由于频繁运动,磨损可能更为严重。解决方法包括维护和检修机械部件,更换磨损件,紧固松动部件。
机械振动和共振:机械结构中的振动和共振现象会增大定位误差。增加结构刚度、减小负载惯量、增加物料粘度等措施有助于消除或减小振动和共振。
机械偏心和偏移:机械部件的偏心和偏移也会导致定位误差。通过调整零部件位置、使用精确的定位元件和轴承等措施可以解决此问题。
2. 控制系统问题
控制算法不准确:控制算法的精度和实时性直接影响伺服电机的定位精度。对于高精度应用,可能需要采用更先进和复杂的控制算法。
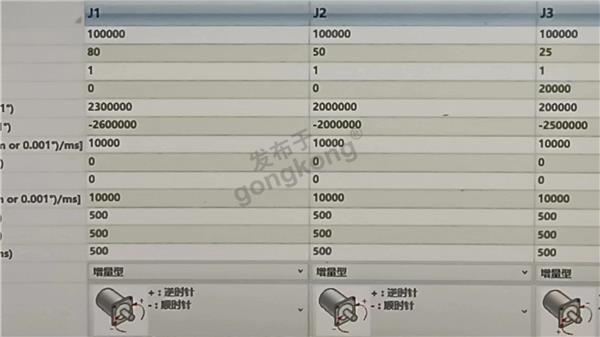
整定参数不合理:控制系统的整定参数对伺服电机的性能有重要影响,包括定位精度。需要通过试验和调整来确定最优参数,以实现更好的动态性能和定位精度。
反馈信号不准确:伺服电机的定位精度依赖于反馈信号的准确性。确保传感器良好、传输误差小、信号处理精度高是提高反馈信号准确性的关键。
3. 环境因素
温度变化:温度变化会引起机械部件的膨胀和收缩,导致定位误差增大。在大温差环境下工作时,需采取加热装置、温度补偿系统等措施来减小影响。
湿度和尘埃:高湿度和尘埃环境会导致机械部件生锈、腐蚀和污染,降低定位精度。需保持工作环境清洁干燥,并对机械部件进行保护和维护。
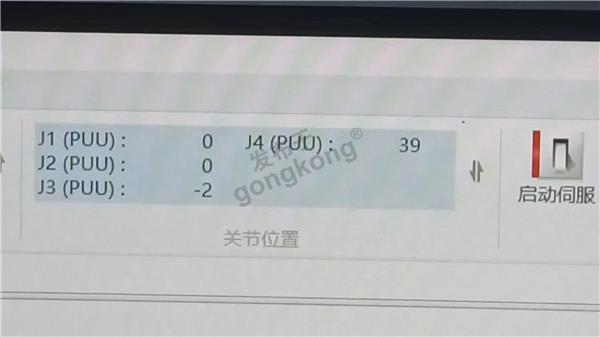
4. 零点标定问题
零点丢失:电池电压不足、接触不良、剧烈震动等都可能导致零点丢失。重新标定零点时,需确保标定过程准确无误。
标定方法:不同的机械手和机器人可能采用不同的标定方法。如ABB的SCARA采用校准销撞校准块的方式,而YAMAHA则采用传感器方式。标定方法的选择应根据机械手的具体型号和精度要求来确定。
5. 其他因素
程序编写错误:程序编写有误也可能导致机械手运动过程中出现位置偏差。需检查并修改程序中的错误。
操作不当:未按照规定操作机械手也可能导致定位精度下降。需加强操作人员的培训和管理。
回复本条
-
 gikuy楼主
gikuy楼主2024-07-04 01:17:09回复



官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
