【10元现金红包】Roboteam中,从机器人跟随外部轴时无法执行焊接摆动两侧延迟 点击:1253 | 回复:2

工位结构
2台KR8 R2010-2机器人倒挂安装(吊装)于同一个平台(此平台可视作线性滑轨)上,平台(线性滑轨)的移动(外部轴电机)由机器人02控制
当平台移动时,2台机器人的底座位置均会随之移动
Workvisual项目配置
【附图】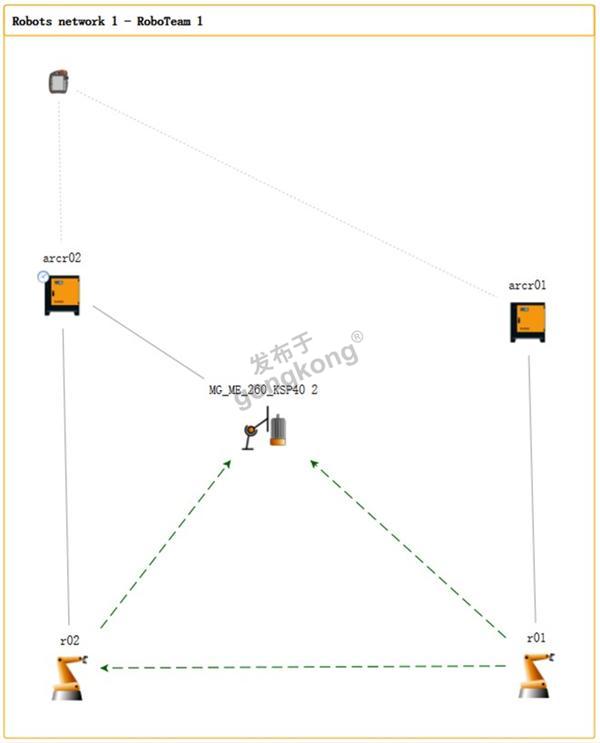
2台机器人组成roboteam,机器人02为主机,机器人01为从机。
机器人底座不安装在外部轴(线性滑轨)法兰上。机器人02不测量线性滑轨。
外部轴(线性滑轨)作为外部运动系统,2台机器人均跟随此外部轴进行移动和协同。此外部轴分配为Base17。
注:
如果将2台机器人底座均安装在外部轴(线性滑轨)法兰上,使用投入运行-测量线性滑轨,输入线性滑轨测量结果后,立即出现故障 KSS12032 位置偏差(运动控制系统-安全控制系统)
如果将1台机器人(机器人02,主机器人)底座安装在外部轴(线性滑轨)法兰上,另1台机器人就会被视作安装于固定底座,无法与线性滑轨协同。
如果有方法避免位置偏差故障,使机器人底座安装于外部轴法兰上,欢迎提出。
工作流程
2台机器人同时对一个工件的2侧进行弧焊焊接。TCP在焊接方向上的移动用外部轴(线性滑轨)完成,机器人本体仅执行TCP(焊枪尖端)的摆动
问题描述
2台机器人同时焊接,且跟随外部轴移动,沿焊接方向前进。
从机器人仅使用摆动,不设置摆动延迟时,可以正常摆动。
从机器人加入侧向摆动延迟后,无法执行摆动,运动轨迹变成一条直线(我的ARCOFF指令使用的是LIN运动)。
机器人未出现报错,可以完整运行程序,中途不停止。
其他提示
如果2台机器人均关闭电弧跟踪,可以执行摆动和两侧摆动延迟,但摆动停留的时间和位置与摆动的频率和幅度不匹配。
如果只运动1台机器人,由从机器人跟随base17运动,摆动正常执行,但这样做线性滑轨本身并没有移动,仅仅是由机器人本体补偿了线性滑轨本该移动的距离。
突破方向主要分为2个
1.不修改运动系统配置(构成),继续由2台机器人跟随线性滑轨
2.修改运动系统配置(构成)
程序示例(简略)
2台机器人使用同样的焊接参数,即同样的焊接速度,同样的摆动模型,同样的摆动参数和摆动两侧延迟。
因此2台机器人的指令也一致,仅仅是位置参数有所区别。
主机器人
INI
SPTP HOME Tool[1] Base[0]
ARCON TRACK WDAT1 LIN P1 Sync=a→1_2 Tool[1] Base[17]
ARCOFF TRACK WDAT2 LIN P2 Sync=b→1_2 Tool[1] Base[17]
LIN P3 Sync=c→1_2 Tool[1] Base[17]
LIN P4 Sync=d→1_2 Tool[1] Base[0]
SPTP HOME Tool[1] Base[0]
从机器人
INI
SPTP HOME Tool[1] Base[0]
ARCON TRACK WDAT1 LIN P1 Sync=a→1_2 Tool[1] Base[17]
ARCOFF TRACK WDAT2 LIN P2 Sync=b→1_2 Tool[1] Base[17]
LIN P3 Sync=c→1_2 Tool[1] Base[17]
LIN P4 Sync=d→1_2 Tool[1] Base[0]
SPTP HOME Tool[1] Base[0]
系统和软件包版本
System KSS8.6.8
ArcSense 3.3.1.14
ArcTechAdvanced 3.3.1.22
ArcTechBasic 3.3.4.387
ArcTechMultilayer 3.3.1.11
RoboTeam 3.1.2.38
SeamTech Tracking 3.1.3.50
SeamTech Finding 3.1.0.22
TouchSense 3.2.2.154
English version
Configuration (mechanical)
2 KUKA KR8 R2010-2 robots hang reversed (assembling to the celling) on a platform, this platform moves as an external axis (linear unit).
Robot Nr.2 has actually control of this linear unit. Robot Nr.1 doesn’t have any connection to the linear unit.
When the external axis (linear unit) moves, bases (Robroot) of both robots will be shifted.
Cell configuration on WorkVisual 6.0
2 Robots are in 1 Roboteam, with Robot Nr.2 Master, Robot Nr.1 Slave.
I let both robots follow the linear unit, instead of place any robots on the external axis’ flange.
I assigned the calibration data from Ext. kinematic systems to base 17.
Explain:
If I place both 2 robots on the external axis’ flange, after I use “Start-up----Calibrate----Linear Unit” and input the calibration data, error KSS12032 "Robot Controller <-> safety controller, position deviation"
will pop up instantly, so I can’t move the robot anymore until I delete this data.
If I place 1 robot (Nr.2, the Master) on the external axis’ flange, the calibration will work, but Robot Nr.1(Slave) will be handled as a robot with fixed base, instead of shifted by the external axis.
How the arc welding process works (supposed to be)
2 robots should weld almost simultaneously from both side of work-piece, and move cooperative with the linear unit, it means, the platform moves on the welding(seam) direction, and the robots themselves only move (or shake) their TCP (point of torch) to make the weaves but not for other further motion.
What’s the Problem?
When Slave Robot using weave setting without weave delay, it works fine.
But if I add any weave delay on it (no matter for 1 side or 2), the TCP of Slave Robot will moves on a straight line during ARCTECH cmd (I used LIN motion for ARCOFF/ARCSWITCH, as you can see in the followed cmds), there is no weave anymore, and of course no weave delay.
There was NO messages or errors on both robots. They ran the cmds from start to end without any stop.
*Other notices
If I turn off ArcSense for both robots (just for a try), the weave and weave delay will be proceed, but in an odd form, which the delay not suiting the weave frequency, TCP often stops and delays when the weaves not in peak. If I only run 1 robot (e.g. the Slave Robot), the weave will be finally normal, but this time there is no moving from linear unit.
And ArcSense is necessary for my arc welding situation so I shouldn’t turn it off in any circumstances. I need to keep it on.





楼主最近还看过


- 伺服电机那个控制系数怎么得...
 [1817]
[1817] - 给大家来一份雅马哈机器人编...[2182]
- 小型简单6度自由机械手[1728]
- 请问哪位有SANKYO ROBOT SC3...[5116]
- ABB机器人robotware6.0以上C...[2603]
- 上银机器人手册[1236]
- IAI电缸控制器PCON回原点速度...[4916]
- [一起发现编程之美]-编程高手...[1323]
- 卡诺普机器人资料,是俺正在做...[3140]
- 发点干货安川机器人资料[1445]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
