快速入门|篇二十一:正运动技术运动控制器自定义通讯 点击:367 | 回复:3

视频教程:http://www.zmotion.com.cn/video/yemian/tvideos28.html
上一节讲了运动控制器MODBUS通讯,今天我们来学习一下,运动控制器的自定义通讯。
控制器的串口和网口默认使用MODBUS协议通讯,若对端设备不支持MODBUS协议,可开启自定义通讯模式(无协议)通讯。
串口和网口均可开启自定义通讯。
串口和网口自定义通讯的开启方法不同,均使用指令开启自定义通讯,读写通道数据所用的读写指令是相同的。
串口使用SETCOM指令开启自定义通讯,网口使用OPEN #开启自定义通讯,选择正确的PORT通道开启通讯。
串口和网口自定义通讯读写指令:读取指令:GET #;发送指令:PRINT #和PUTCHAR #。
本文测试举例的产品是正运动技术的一款快速开发16轴的运动控制系统的ZMC316独立型脉冲运动控制器。
在正式学习之前,我们先来介绍ZMC316控制器。其支持多达24轴直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴设置等;采用优化的网络通讯协议可以实现实时的运动控制。
ZMC316通过ZDevelop开发环境来调试,ZDevelop是一个很方便的编程、编译和调试环境。应用程序还可以使用VC,VB, VS, C++Builder, C#,等软件来开发。调试时可以ZDevelop软件同时连接到控制器,程序运行时需要动态库zmotion. dll。

ZMC316具有16个轴,可支持多达24个虚拟轴。ZMC316可以通过扩展模块来扩展轴。
ZMC316板上自带24+15个通用输入口,8+15个通用输出口(前15轴另带1个输入口,2个输出口),2个0-10V AD, 2个0-l0V DA。
ZMC316带1个RS232串口,1个RS485,1个RS422,1个以太网接口。
ZMC316带一个CAN总线接口,支持通过ZCAN协议来连接扩展模块。
ZMC316带一个U盘接口。
每轴输出脉冲频率可达8MHz。
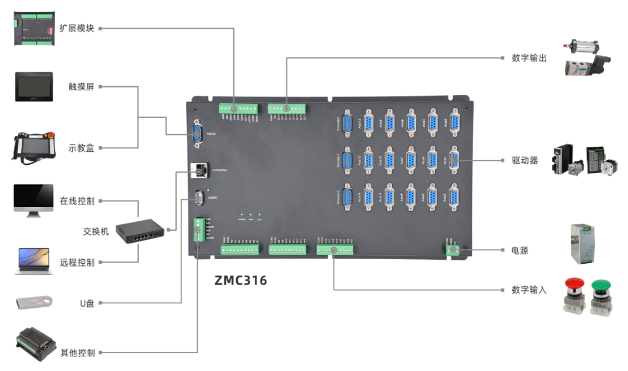
ZMC316接线图
以下是本文的主要内容。
壹 串口自定义通讯(无协议)
1.开启方法
开启自定义串口通讯需要选择port编号,默认RS232为port0,RS485为port1,使用指令将port配置为自定义串口通讯模式。
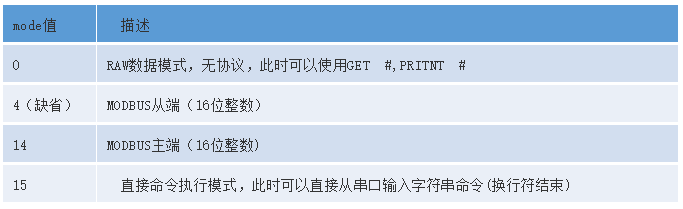
SETCOM指令除了可以配置串口的通讯基本参数外,还可以选择参数配置通讯协议,开启自串口定义通讯模式将mode=0无协议模式,填写串口基本参数和开启的port编号。
语法:SETCOM (baudrate,databits,stopbits,parity,port[,mode] [,variable] [,timeout])
开启示例:
RS232(PORT0):SETCOM (38400,8,1,0,0,0,2,1000)
RS485(PORT1):SETCOM (38400,8,1,0,1,0,2,1000)
2.读写方法
网口或串口自定义通讯采用的指令相同。
自定义通道中读取字符:GET #
自定义通道中发送字符:PRINT #、PUTCHAR #
两个指令一次只能发送一个数据,若要发送多个数据,可采用数组。PRINT #与PUTCHAR #的区别是前者发送的数据为字符串,一次只能发送一个数据,发送的数组为ASCII码;后者均为ASCII码。
(1)GET #
语法1:GET #PORT, VARIABLE
语法2:GET #PORT, ARRAY[(startindex)] [,maxchares]
语法3:charesget = GET #PORT, VARIABLE
语法4:charesget = GET #PORT, ARRAY[(startindex)] [,maxchares]
port:通道号
variable:存放的变量名
startindex:存放数组的起始地址
maxchares:存放的最多数量
语法1、2没有读取到会阻塞,这个函数一般在多任务里面进行调用。
语法3、4会返回读取到的字节数。
串口和网口的TCP通讯四种语法均可使用,网口的UDP通讯时使用语法4, 采用数组来接收,数组长度不要比一次的UDP包长度小。
例一:读取字符
GET # 11,tempchar '从自定义网口通道11获取单个字符到tempchar
读取结果:

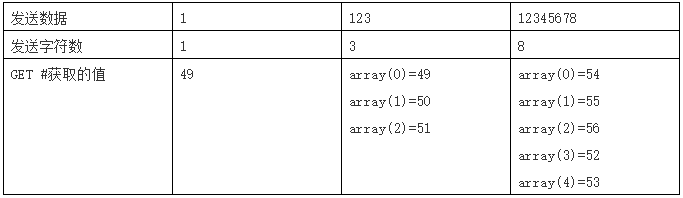
例二:读取到数组
GET #11,array(0),5 '一次获取最多5字符到数组,后收到的数据覆盖之前的数据
读取结果:
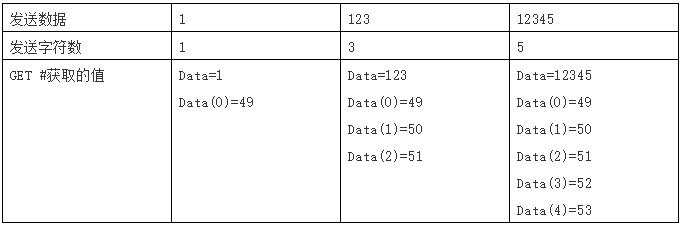
例三:读取到数组(UDP模式下只能使用此语法)
CHARES=GET #11, Data, 10 '从通道11获取数据到数组,读取数据长度设为10
读取结果:
(2)PRINT #
PRINT # PORT, "字符串"
port:通道号
例一:发送字符串
PRINT # 11, tempchar '一次发送一个字符串

例二:发送数组为ASCII码
PRINT # 11, Data '一次发送一个字符串

(3)PUTCHAR #
语法1:PUTCHAR # PORT, 字符
语法2:PUTCHAR # PORT, ARRAY(index, numes)
port:通道号
index:开始输出的位置
numes:输出的字节个数, 二进制方式
例一:发送字符为ASCII码,不能直接发送字符串
PUTCHAR # 11, tempchar '一次可发送多个字符,逗号隔开

例二:发送数组为ASCII码
PUTCHAR # 11, Data '一次发送一个字符串

3.通讯例程
控制器通过485总线开启自定义通讯读取三菱绝对值编码器数据。
'//*****返回数据帧中有用的字符串长度为8****
global Dim CmdBuff(10) '发送命令数组
global Dim GetBuff(30) '接收的字符串
for i=0 to 29
GetBuff(i)=0
next
global Dim TempChar '接收的一个字节
TempChar=0
global Dim GetNum '接收字节个数
GetNum=0
global sanReturn '任务完成后的返回值,方便PC读取
sanReturn=0
SetCom(19200,8,1,2,1,0) '建立485连接
'必须创建新任务,因为Get指令如果得不到数据,会堵塞所在任务。
RunTask 5,get_Char
delay (100)
'命令数组的值根据从站三菱的自定义通讯的协议要求写的
'\x01\x31\x30\x32\x02\x39\x31\x03\x30\x32
'目前的从站地址为1,修改从站地址后要修改校验码
CmdBuff(0,$01,$31,$30,$32,$02,$39,$31,$03,$30,$32)
PutChar #1,CmdBuff '往485串口发送数据
TICKS=1000
while(1)
if GetNum=14 AND (GetBuff(2)=97 OR GetBuff(2)=65) then
? "485 success"
'把返回数据帧的有用内容放入VR寄存器中,方便PC读取
for i = 0 to 7
VR(100+i) = GetBuff(i+3)
next
sanReturn=1
exit while
elseif TICKS<0 then
? "ERROR"
STOPTASK 5
exit while
endif
wend
end
global Sub Get_Char()
print"开始进入接收函数"
While 1
Get #1,TempChar '接收串口返回字符
print"接收到的字符数",GetNum TempChar
GetBuff(GetNum)=TempChar
GetNum=GetNum+1
'判断返回的数据桢长度是否正确
if(GetNum=14)Then
exit while '长度超出退出while循环
endif
Wend
End Sub
贰 网口自定义通讯
1.开启方法
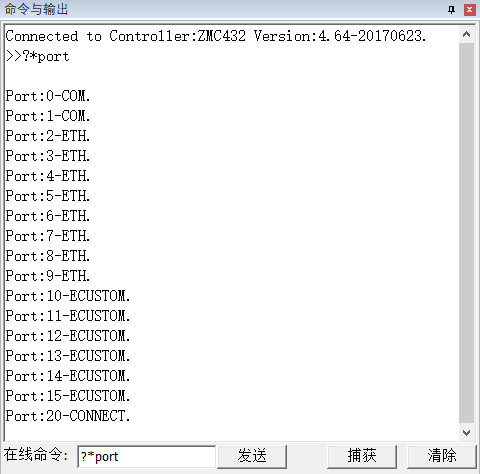
开启自定义通讯时要填入端口编号,首先要查看控制器自定义通讯的通道号,可在在线命令发送?*port打印查看,如下图,ECUSTOM为自定义网口通道。
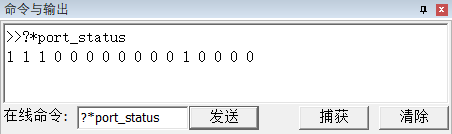
使用网口连接上控制器之后打印的各通道状态如下,未使用的通道状态为0,已使用的通道状态为1对于串口,串口通道状态不管有没有使用始终为1。
第三个通道为ETH网口通道,被ZDevelop软件占用。

开启网口自定义通讯,选择port11,此时状态如下:
网口自定义通讯使用OPEN #指令开启,通过此指令选择主从端。
OPEN #PORT, "mode", portnum [, ipaddress]
port:通讯通道,参见PORT描述,选择自定义网络通道。
mode:讯主从,“TCP_CLIENT”-从,“TCP_SERVER”–主,“UDP_CLIENT”-UDP从,“UDP_SERVER”–UDP主。
portnum:TCP或UDP端口号, 主端为本地端口号, 从端为对方端口号。
ipaddress:对方IP地址,字符串,从端的时候要提供。
UDP_SERVER必须先接收对方的数据,才能发送回数据(除非用PORT_TARGET先强制指定对方)。
UDP_CLIENT本地端口号随机,必须先发送给对方,对方才能知道端口号,此模式时不是指定对方的包会丢弃掉。
UDP自定义通讯需要4系列控制器20170628以上固件版本;XPLC系列控制器 20170702以上固件版本。
TCP在收发数据前,必须和对方建立可靠的连接,然后再传输数据,大大提高了数据通信的可靠性。
UDP在收发数据前,不建立连接,当它想传送时就去抓取来自应用程序的数据,并尽可能快地把它扔到网络上,可能会丢包。UDP程序结构较简单,信息包比较小只有8个字节,TCP的信息包有20个字节。
2.读写方法
读写指令与串口相同。UDP读取时只能使用GET #语法4。
3.TCP通讯例程
使用自定义网口通道port11,程序如下。
OPEN #11, "TCP_SERVER",945 '使用自定义网口通道2,控制器作为主端,端口号945
GLOBAL tempchar
GLOBAL CONST datamax=20 '定义数组空间的大小
GLOBAL Data(datamax) '定义数组
GLOBAL datanum '定义数组编号
datanum=0
ClearData() '清空数组
WHILE 1
tempchar = 0 '清除之前的字符
GET #11,tempchar '获取单个字符到tempchar
PRINT datanum,tempchar '打印出字符的ASCII码
Data(datanum) = tempchar '保存到数组
datanum = datanum + 1
IF datanum = datamax THEN '超过数组空间,清空数组
datanum = 0
ClearData()
ENDIF
IF tempchar = 59 THEN '号终止位;
PRINT #11,"ok" '发送字符串
ENDIF
WEND
END
GLOBAL SUB ClearData()
FOR i = 0 TO datamax-1 '清除数组空间内容
Data(i) = 0
NEXT
END SUB
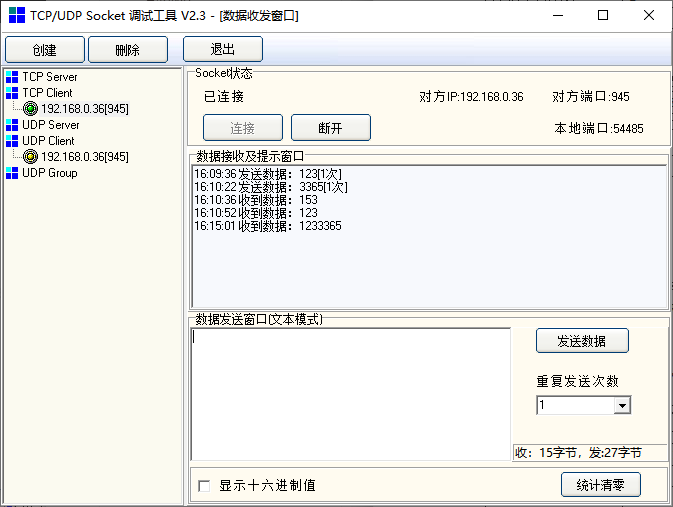
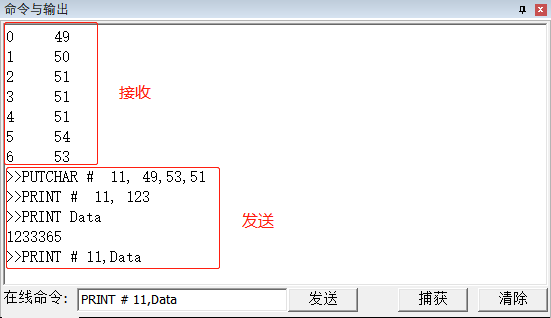
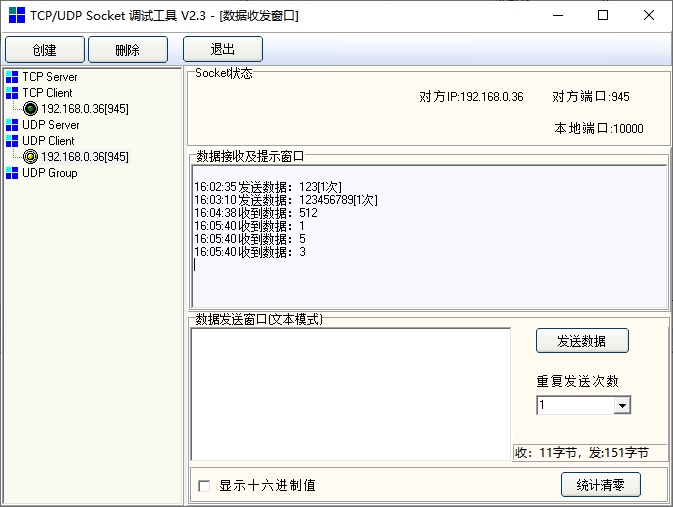
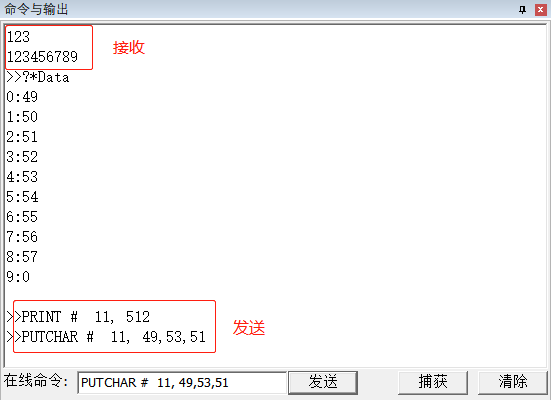
运行效果:
4.UDP通讯例程
使用自定义网口通道port11,程序如下。
OPEN #11, "UDP_SERVER",945 '使用自定义网口通道2,控制器作为主端,端口号945
GLOBAL CHARES
GLOBAL CONST datamax=10 '定义数组空间的大小
GLOBAL Data(datamax) '定义数组
ClearData() '清空数组
WHILE 1
CHARES=GET #11, Data, 10 '从通道11获取数据到数组,数据长度设为10
IF CHARES > 0 THEN
Data(CHARES) = 0 '设置结束0
PRINT Data '打印字符串
ENDIF
WEND
END
GLOBAL SUB ClearData()
FOR i = 0 TO datamax-1 '清除数组空间内容
Data(i) = 0
NEXT
END SUB
运行效果:
正运动技术运动控制器的自定义通讯就讲到这里,更多学习视频及图文详解请关注我们的公众号“正运动小助手”。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。





楼主最近还看过

 工控网智造工程师好文精选
工控网智造工程师好文精选
