工业机器人基础:坐标系认识 点击:1150 | 回复:1

工业机器人基础:坐标系认识
在对机器人工作站进行调试时,调试人员会对建立所需的坐标系,同过各个坐标系,来进一步确定与构建机器人的作业路径。本期文章会以常见的六轴工业机器人为例,为大家讲解机器人坐标系的相关知识。
机器人坐标系的种类
目前各大品牌的工业机器人系统中,普遍都使用关节坐标系与空间直角坐标系。为了让使用者更方便的确定机器人位姿信息,机器人系统中使用的直角坐标系又分为大地坐标系、基坐标系、工具坐标系与工件坐标系。
关节坐标系
以目前常用的六轴机器人为例,关节坐标系表示机器人每个运动轴的位置量。机器人自身具备六个关节轴,其中,轴1、轴2、轴3为机器人的基本轴,实现末端执行器在工作空间中的位置运动。轴4、轴5、轴6为机器人的腕部轴,实现末端执行器在工作空间中的姿态运动。

此外,机器人工作站中若具有外部运动机构,则具备外部轴。外部机构与机器人的控制柜连接,通过示教器直接控制其运动:

通过控制外部轴轴7,控制机器人在导轨上的移动。
空间直角坐标系
一个物体在空间中,通过一个点可以确认其位置,以该点为原点建立一个空间直角坐标系,其坐标系X、Y、Z轴的方向则可确定其姿态。机器人系统便是基于这一原理,来实现工作站中各作业点的准确定位。
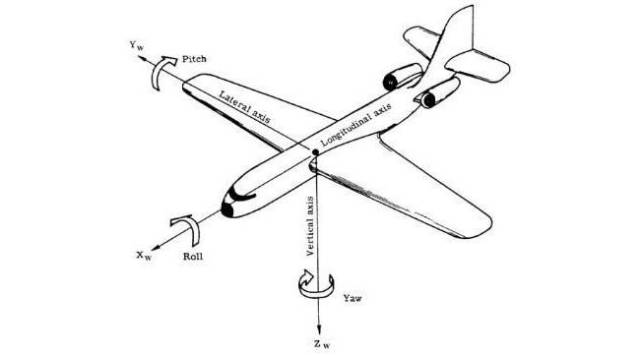
运用空间坐标系来表示飞机的位姿信息
基坐标系与大地坐标系
在整个工作站的构建中,大地坐标系作为工作站的基准坐标系。而基坐标系则作为工作站中机器人本体的坐标系,确定机器人相对于大地坐标系的位姿。假如整个工作站中仅具有一台机器人,且机器人基座固定不移动,这种情况下默认大地坐标系与基坐标系重合,位置一致。
机器人的基坐标
工具坐标系
工业机器人通过移动,操作安装在第六轴的末端执行器进行作业。工具坐标系用于确定执行器在作业中的位姿,工业机器人的运动,便是通过操作示教器,控制当前使用的工具坐标系基于别的坐标系进行移动。
机器人都具有一个预设的工具坐标系tool0,位于轴6的连接法兰盘处,通过操作示教器,可建立相应的工具坐标系对应不同的执行器。
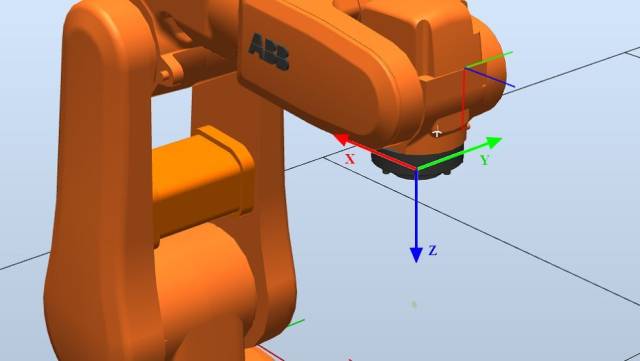
系统预设工具坐标系tool0
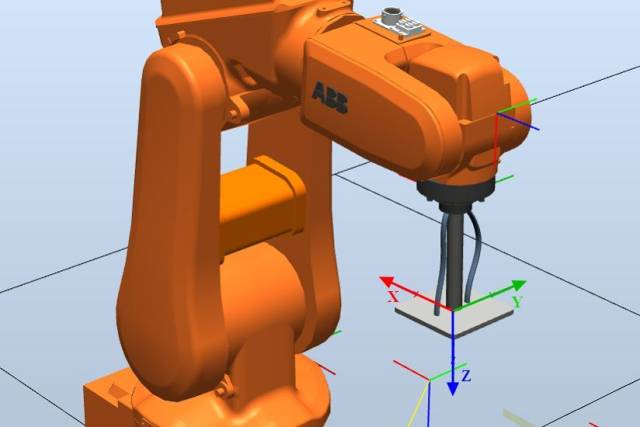
安装执行器后,新建立的工具坐标系tool1
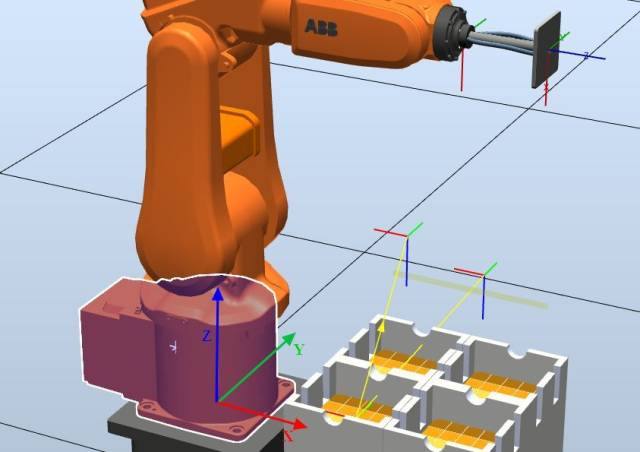
工件坐标系
工件坐标系用于工作站中工件的定位,一般情况下,机器人编程时的路径点与作业点都是工具坐标系相对于工件坐标系的位姿量来创建的。设定多个工件坐标系,对应不同工件、或者同一工件在不同位置等情况,那么当需要更改作业路径时,只需更改使用的工件坐标系,对应的路径都会随之更新。
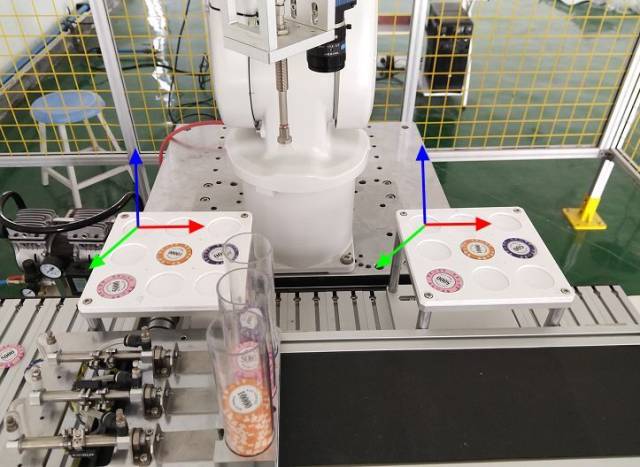
通过建立两个工件坐标,在作业过程中,仅需改变使用的工件坐标系,便可实现同一程序,在不同的地方作业
小结
机器人品牌众多,但基本都是依靠六组操作键,来进行上述两种坐标系进行位姿的确定与变换,图示分别为ABB与埃夫特机器人的示教器界面。
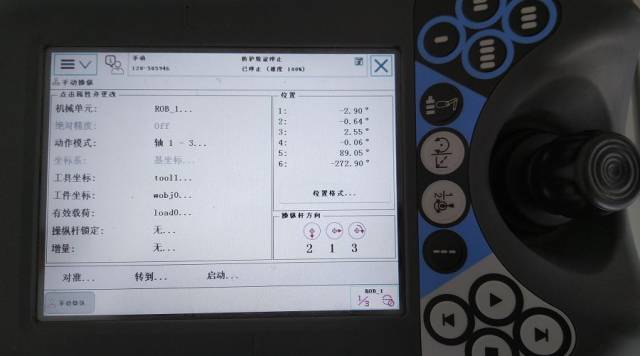
abb示教器控制界面(关节坐标系)
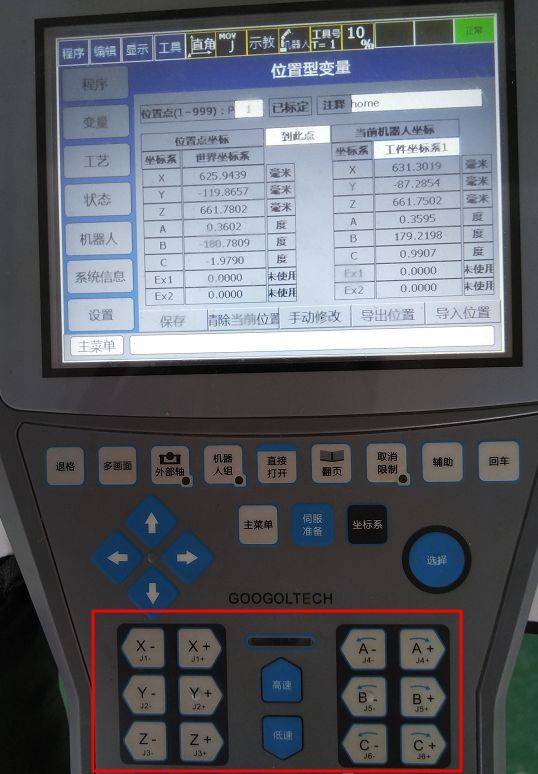
埃夫特示教器位姿控制界面(关节坐标系)
abb示教器通过其三组摇杆运动(上下、左右、顺逆时针转动),结合按键切换来实现六个轴的控制,而埃夫特示教器则直接通过六组按键,来实现六轴控制。
而切换至空间直角坐标系后,其六组操作则分别对应当前工具坐标对应其他坐标(基坐标、大地坐标、工件坐标)的XYZ轴方向的移动以及绕XYZ轴的旋转。
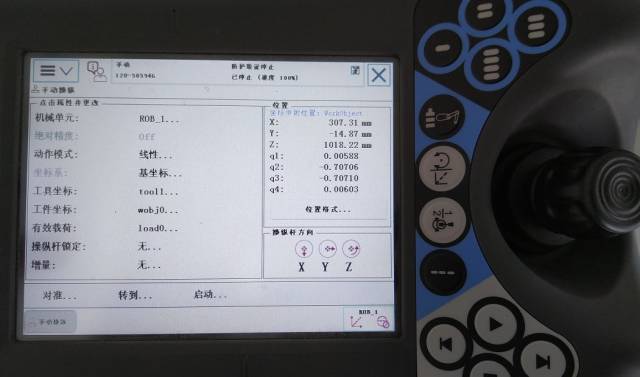
当前界面为控制工具坐标tool1相对工件坐标wobj0的运动





楼主最近还看过

- 请问各位机器人高手
 [792]
[792] - 求教 OTC AX21 焊接机器人E0...[4478]
- 求助 机器人、机械手、光电编...[989]
- abb机器人系统启动失败怎么办...[2758]
- 机器人做多种工作的必须工具...[9435]
- 昨天遇到一个家伙,直接给机器...[931]
- 请教大侠,一个新机器人拿来之...[1008]
- 请求首钢莫托曼机器人教程[1033]
- 库卡krc4compactX11安全接口[2741]
- RobotStudio 官网英文视频教...[1188]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
