请问有没大神用MODbus控制多台伺服或步进驱动的例程? 点击:2977 | 回复:21






楼主最近还看过



发表于:2020-03-03 15:15:12
18楼
我看有好多回复的,可能没有回复到你说的问题点上,你说的是用MODBUS协议来控制伺服,并不是简单读写指令那么简单。
我这里不说MODBUS协议来如何读写变频器/伺服等参数了,专门讲下如何控制伺服定位。
物理层为485.使用MODBUS RTU协议。伺服驱动器必须要特殊的,带点位控制的。比如我下面介绍安川伺服的点位控制模式。
PLC与伺服通过485物理层连接 一共三根线 485+ 485- GND 多台伺服使用总线超过30CM建议加终端电阻120欧姆。
要实现MODBUS RTU控制伺服 必须要有伺服的 “控制字” “状态字”
伺服电机使用绝对值编码器,设备无需回零,直接绝对定位。
由于属于串行异步半双工通讯 PLC编程必须做好轮循,也就是读写不能同时进行。比如信捷PLC的顺序功能块,往下排即可。
控制字: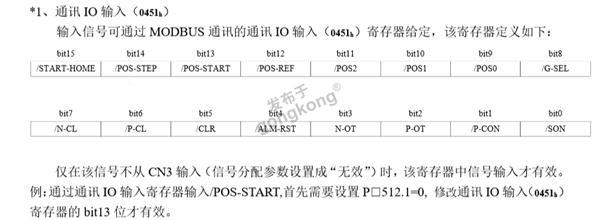
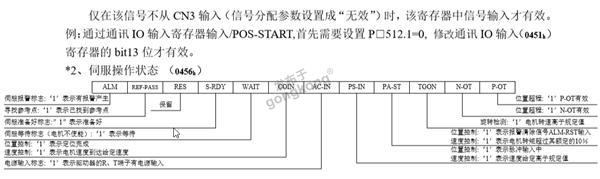
状态字:
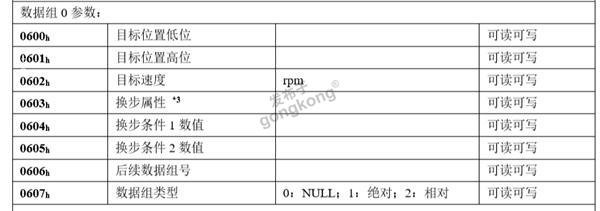
设定数据组位置:
读电机位置方法:
私信发程序:
使用方法:
伺服电机初次装设备上,先多圈清零,然后给绝对定位位置为0,让电机走到绝对0位置,以后可以根据这个0位置进行绝对定位,当然初次不归零,直接读实际位置计算也行,只不过程序蛮烦些。
总之伺服用485控制定位是可行的。不管CANopen,Profinet,EtherCAT去定位均可行。
看应用场合和高级程度,总结如下:
EtherCAT>Profinet>CANopen>MODBUS RTU。


热门招聘
相关主题
- 继电器输出型PLC,驱动一交流...
 [8103]
[8103] - 工控老鬼 工控人生之 在现场...[8817]
- 我感觉国产的PLC打不开市场,...[10813]
- PLC是什么?什么是plc[13065]
- 日本欧姆龙PLC应用经验点滴[7564]
- 模拟量输出模块(4-20MA)电流...[8747]
- PC编程与S7-Smart的以太网通...[10699]
- 工控PLC擂台-每周一题-打擂英...[8157]
- 从零开始学习GE PAC proficy...[21643]
- 用plc编写星三角降压启动的梯...[67605]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
