串级调节系统参数整定方法(串级调节器参数整定) 点击:198 | 回复:0

发表于:2020-01-18 17:30:58
楼主
串级控制系统由单回路PID调节器(作为主调节器)和外给定调节器(作为副调节器)彼此串接组成双回路调节系统,主调节器的控制输出作为外给定调节器的设定值,外给定调节器的控制输出送往控制调节结构。
串级调节系统参数整定一般采用两步法和一步完成,串级调节系统与单回路调节系统参数整定思路和方法不同,云南昌晖仪表制造有限公司以图文形式介绍这两种串级调节系统参数整定方法,希望对大家有所帮助。
两步法整定串级调节系统PID参数
步骤如下:
1、将串级调节系统主环闭合,主调节器和副调节器的积分时间放最大,微分时间放最小。
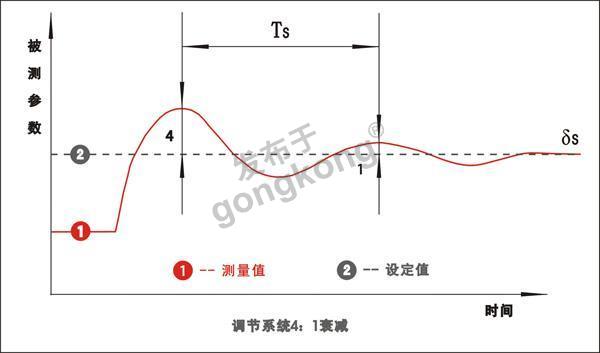
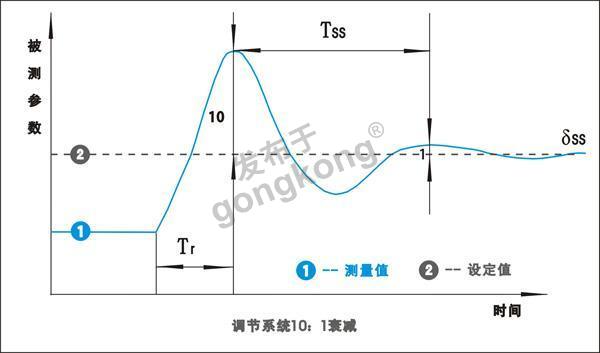
2、将主调节器的比例度放100%刻度上,按某种衰减比(如4:1)整定副环(整定时副调节器的比例度由大往小逐步变化),求取该衰减比下副调节器的衰减比例度δ2s和衰减操作周期T2s。
3、将副调节器(外给定调节器)比例度置于δ2s位置,用同样的方法和衰减比整定主环,求取该衰减比下主调节器(单回路调节器)的衰减比例度δ1s和衰减操作周期T1s。
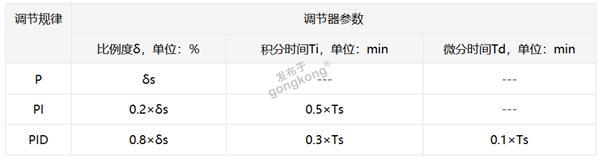
4、由所得的δ2s、T2s和δ1s、T1s数据,结合调节器的选型,按实验时所选择的衰减比,选择适当的经验公式,求出主调节器和副调节器的整定参数。
4:1衰减曲线法PID参数整定经验公式
5、按照“先副后主”与“先比例次积分后微分”的次序,将计算出的主调节器和副调节器参数设定好。
6、观察自动调节系统控制过程,必要时对调节器参数进行适当调整。
1分不嫌少!
赏





楼主最近还看过
热门招聘
相关主题
- PID参数范围
 [2108]
[2108] - 第十讲 多屏操作站和操作站...[4305]
- 求助:哪位大侠能告诉我新华D...[3973]
- 如何选择调节器的正反作用[1784]
- DCS控制室的其它要求[1948]
- 一份工作的面试书![2513]
- 考高级电工证[2418]
- 2015年中国区域的DCS市场竞争...[6168]
- 仪表位号的表示方法[2269]
- DCS的技术规范[3000]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
