PLC对步进电机的控制 点击:2062 | 回复:4

200 SMART系列PLC提供了三种驱动步进电机的方法:
1、脉冲串输出(PTO)
2、脉宽调制(PWM)
3、运动轴
步进电机是将电脉冲转变为角位移或线位移,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数量,不受负载变化的影响,即给电机一个脉冲信号,电机旋转一个步距角。因此PLC驱动步进电机主要依靠PLC的高速脉冲输出功能,200 SMART系列PLC最多支持3个高速脉冲输出,其具体输出数量取决于PLC的型号如下表1所示。
CPU型号 | ST20 | ST30 | ST40 | ST60 |
高速脉冲输出 | 2@100KHz | 3@100KHz | 3@100KHz | 3@100KHz |
表1
继电器输出型号(SR)与经济型(CR)不支持高数脉冲输出功能。
硬件连接:
PLC无法对步进电机进行直接驱动,需要通过步进电机驱动器进行完成。其作用是将电脉冲信号转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向旋转一个固定的角度(即“步距角”)。步进电机驱动器如图1所示。

![]()
图1 步进电机驱动器
驱动器上的ENA为脱机信号(可不接);DIR为方向信号;PUL为脉冲信号,需要接到PLC的高速脉冲输出端口上。SMART系列PLC对应的高速脉冲输出口如表2所示。
PWM通道号 | PWM输出口 |
PWM0 | Q0.0 |
PWM1 | Q0.1 |
PWM2 | Q0.3 |
表2
驱动器还需要对一些参数进行设置,这里以TB6600步进电机驱动器为例,通过该驱动器上的6个DIP开关进行参数设置,S1~S3用于选择8档细分控制,通过S4~S6进行电流控制。细分数即步进电机旋转一周所需的脉冲数。电流控制根据选择的步进电机电流值不同进行修改,当选用2A的电机时需要将电流值设置为2A。具体参数可通过电机标签以及驱动器上标注进行查看。
步进电机驱动器的信号输入电压主要以5V与24V为主。PLC的信号输出电压为24V,且与SMART PLC进行连接时为共阴极接线。
当选用24V步进电机驱动器时可直接与PLC信号段进行连接,接线图如图2所示。
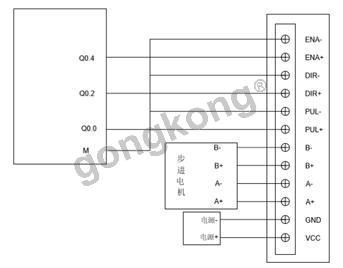
图2 24V驱动器接线图
当选用5V驱动器时,需要进行降压处理,最简单的方法可以通过串联电阻降压,通过串联2K电阻将电压从24V降至5V。接线图如图3所示。
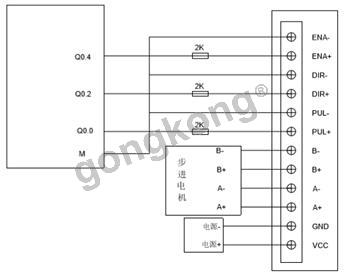
图3 5V驱动器接线图
下面主要介绍一下通过脉宽调制(PWM)对步进电机进行驱动的方法。
首先通过工具菜单中的PWM选项进入到脉宽调制的向导中

图4 PWM向导入口
组态PWM向导步骤:
1、选择脉冲通道
① 选择需要使用的PWM输出通道
② 下一步
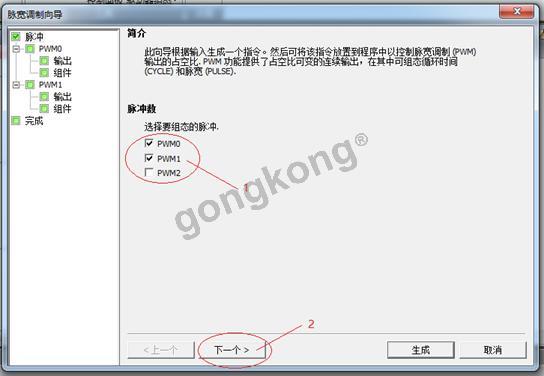
图5 选择脉冲通道
2、 对PWM通道的名称进行设置
① 可以对PWM通道进行重命名(例:X轴),默认为PWM0~2
② 下一步
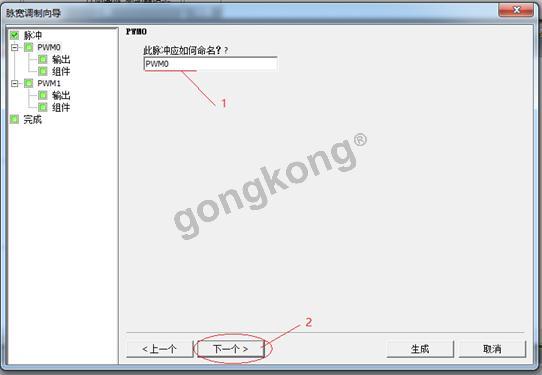
图6 更改PWM通道名称
3、组态PWM通道输出时基
③ 点击下拉菜单,打开选择栏
④ 由于驱动步进电机需要较高频率的脉冲输出,需选择微秒为时基
⑤ 下一步
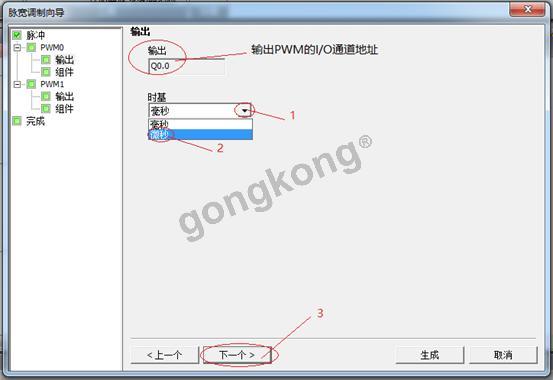
图7 输出时基设置
4、PWM通道0设置完成,生成对应项目组件。通道1、2与其设置方法一致
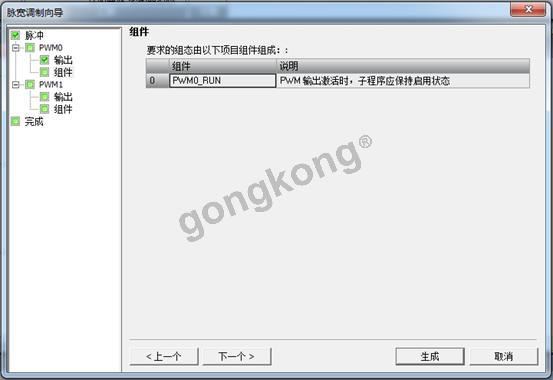
图8 生成项目组件
完成PWM向导设置后,即可通过调用PWMx_RUN子程序输出高数脉冲对步进电机进行驱动。可通过图8所示方法调用PWMx_RUN子程序。
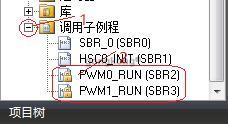
图9 PWMx_RUN子程序
图10为PWMx_RUN指令,其中:
EN为程序块使能信号
RUN为脉冲生成控制输入(1:对应I/O通道持续生成高速脉冲;0:无操作)
Cycle:写入脉冲周期
Pulse:写入脉冲宽度(即:占空比)通常设置为周期的一半(即:占空比50%)
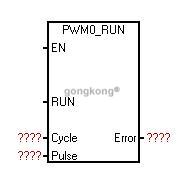
图10 PWMx_RUN指令
在程序中即可通过对脉冲周期进行更改,实现对电机速度的控制。通过修改驱动器DIR方向信号连接的PLC输出口,更改电机运行方向。
PWM驱动方案分析:
优点:控制变量较少,脉冲周期便于修改
缺点:对输出脉冲数量不易控制
所以该控制较为适用于闭环控制系统之中。开环控制系统中,建议使用运动轴控制方案。
PTO与PWM功能大体一致,差异在于PTO不可对占空比进行调节,默认为50%。






- 求助;用三菱plc,GX Develope...
 [15564]
[15564] - 请用过艾默生PLC的朋友,谈谈...[7565]
- PLC控制系统设计的基本原则[7436]
- 如何使PLC里的时间继电器复位...[7197]
- 请大家使用我开发的软件PLC软...[16299]
- PLC如何求模拟输入量在一段时...[10423]
- plc怎么控制电机转速[7260]
- 两线、三线制热电阻接线的区别...[17704]
- 继续干货分享:PLC 与WINCC 的...[7125]
- 提供三菱技术交流平台之二[8144]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
