软件版擂台赛第24期 伺服软件调试能否实现最佳运动效果? 点击:578 | 回复:9

软件版擂台赛第24期 伺服软件调试能否实现最佳运动效果?
工控论坛在技术上的争鸣使我感动,很多前辈一直为真理和实践真知贡献自己的一生所知。那些学者、前辈、高级工程师对于电机的运动深入探讨和不同角度给予分析及说明。帮助更多的人获得正确的应用。像批评我的刘老师及我最敬佩的高级工程师 征和慢鸟先飞。都给了我很多对于控制电机的全新认识。再次表示感谢!
为了让大家更好的了解运动控制和软件的关系和在火炮、雷达等军事领域还是高精度数控机床、机器人、纺织、食品加工或半导体加工等工业领域,伺服系统都起着举足轻重的作用。交流伺服具有调速范围宽、稳定性高、动态响应快等诸多优点。考虑到交流伺服系统这些特点,如何更快捷地实现其各参数调节,且实时显示其实际值。为此本期主题对“伺服软件调试所达到的效果”展开讨论,期望刘老师和各位前辈赐教。
获奖评选条件:伺服软件调试能否实现最佳运动效果?结合使用经验,对伺服软件使用定义给予详细的描述和解释。文件具备较强的操作性。
要求:使用文字,图形均可。参赛内容通俗易懂,条理分明,逻辑性强。实例应给出软件名称,平台和配置文件。
注意: 跟帖或者另开贴均可,载体及描述品牌不限。
提示: 原创备受支持!
奖项设置:一等奖1名:30MP,二等奖2名:10MP,鼓励奖若干:50积分。
MP介绍:gongkongMP即工控币,是中国工控网的用户积分与回馈系统的一个网络虚拟计价单位,类似于大家熟悉的QB,1个MP=1元人民币。
MP有什么用?兑换服务:以1个MP=1元来置换中国工控网的相关服务。兑换现金:非积分获得的MP可兑换等值现金(满100MP后、用户可通过用户管理后台申请兑换)。
本擂台赛为半月期。结束时间为12月1日。公布获奖结果为12月2日前。





楼主最近还看过




 上面是监控,下面是数据分析;通讯方式(RS422);
上面是监控,下面是数据分析;通讯方式(RS422);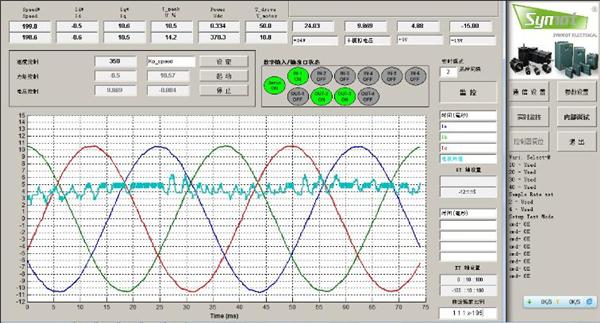
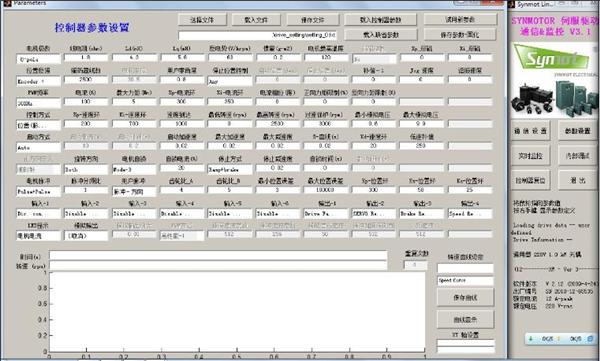

我们的步骤一般先确认电机参数(极对数,编码器类型,电机功率,电感,反电势,电阻);
然后确认控制模式,及输入输出定义;
再运转后,开始调整电流环,速度环,(电流的Kp,Ki和速度环的Kp,Ki);这两个是相互关联的,一般在高速度响应的时候,调整比较多;调整后的效果,速度响应快,无明显过冲,速度稳定,减速平滑稳定;具体调试时,还是要看经验的;一般电流环我们看交轴电流跟随设定交轴电流的跟随状况,电机运转不要有异音,匀速运转时,交轴电流的稳定状况;速度环看电机实际速度跟随设定速度的情况。
然后,有位置控制的时候,接下来调位置环,位置Kp,位置前馈Ks,Kp是根据位置误差来计算速度,而Ks是根据脉冲频率,来提高速度响应;加减速及S曲线在整个调试过程都起作用。
感觉,数据可以分析,但有时两者差不多,有点靠经验。去调过数控,感觉我们的,走的和别人家的速度差不多(别人家的电机编码器信号接入我们驱动器,同时 脉冲也接入,来分析人家的运行状况)。但加工出来的效果,就是人家的要好!



plc在做伺服电机原点复位时.有那些复位方式的重复定位精度比较高,还有就是当伺服或步进在运行过程中.当检查到有一个输入信号后.走一定长.(如何能做到这定长的精确.这个定长值能做到10um的精度吗?) 如果可以.一般要怎么去实现.编程上有没有什么技巧.如果不能.是不是要加编码器.或电阻尺之类的东西来作反馈信号.
1、用s型逐步逼近的原点回归方式重复精度很高,另外你的原点传感器最好用光纤。普通的光电开关很难满足。
2、精度取决于你的丝杆的导程精度和伺服或步进的齿轮比。如果你要做回馈的话编码器就不用了,只要将伺服的编码器反馈回来就可以了。
- 西门子触摸屏Admin的初始密码...
 [25948]
[25948] - 如果是你,你会选择组态王,力...[3006]
- PID 参数自整定[2131]
- 组态王的售后服务不错[1996]
- Protel DXP使用漫谈[6925]
- 求助:搅拌站控制系统[4582]
- 哪里有三菱F930GOT-BWD-C触摸...[5816]
- OPC Client开发体会(转自我的...[2282]
- PLC编程实例[13876]
- 软件问题导致电子图板意外关...[2964]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
