伺服电子齿轮的设置 点击:5088 | 回复:59

在设备电子齿轮时,需要知道脉冲当量(也就是一个脉冲所对应的进给量或角度数),那么这个脉冲当量该怎样计算?还是可以给定?
在J2S的说明书上的例子中:伺服电机的脉冲分辨率是131072,机械一转的进给量是10mm,变速比为1:2,那么这脉冲当量是不是为10/131072*2得到的是0.038um,而给定的一个脉冲为10um的进给量? 有点疑惑。请指教!
谢谢!
脉冲当量分指令脉冲当量和反馈脉冲当量
如果伺服已选定为J2S,则执行端的反馈脉冲当量的确为“10mm/(131072*2)“,按楼主的计算为“0.038um”,而指令脉冲当量为10um,即楼主所说的“给定的一个脉冲为10um的进给量”,如何统一“0.038um”的反馈脉冲当量与“10um”的指令脉冲当量间的不一致性,这就需要用到日系和仿日系通用伺服驱动器的电子齿轮比功能。
“10um”的指令脉冲当量,与“机械一转的进给量是10mm”,就意味着机械每转一圈,需10mm/10um=1000个这样的指令脉冲,而“变速比为1:2”,即伺服电机转过2圈,因而电机每转1圈所需的指令脉冲数为500。
以500的每转指令脉冲数,对131072的单圈反馈分辨率,就可以核算出所需的电子齿轮比=131072/500
當你在規畫電控系統最先要考量的是 設備的產能及精度
机械一转的进给量是10mm,是指一丝的螺距吧,可以先确定机械精度要求,再求脉冲当量,进而计算电子齿轮比设置。共参考。
市面上有一絲螺距的絲桿嗎? !
什麼叫脈衝當量 其實從單位就可看出其定義 步距(mm)/ PLUSE(脈衝)
有些上位控制器 脈衝當量不會自動形成 所以就需要運算 提高系統解析度 再電控的方法有兩種 4倍頻 及電子細分(倍頻) 或機械手段 就是加裝減速機 再高解析度之伺服系統 若不用電子齒輪比 將解析度降下來 設備產能將會受影響 速度會受限制 電子齒輪的設定式在精度與產能下所要考慮兩者的平衡點
此系統最高解析度為18位
不管透過機械 或電子細分 來提高系統之解析度(分辨率) 都不能提高系統的精度





楼主最近还看过
发表于:2012-03-30 09:40:34 7楼
波恩
脈衝當量只有一個 在系統裡面 並且存在控制器內的一個參數 驅動器不是控制器 他所接受僅是編碼器的訊號 非脈衝當量 並且將此訊號(正余弦) 經內部模擬量做倍頻 及 4倍頻 轉成17位TTL 再透過電子齒輪 輸出適合此系統 之速度 經度 要求之 脈衝數 給控制器
控制器一般不自動形成脈衝當量 可能考慮 需要增很多運算指令 影響控制的響應速度 固讓使用者自行運算
发表于:2012-03-30 19:37:38 9楼
承蒙老兄提醒,不胜感激!
只不过回转式反馈既然有分辨率,或解析力,对应到直线运动的负载端,每一个反馈计数增量就必然对应一个确定的理论位移量,这个与反馈分辨率对的位移量就是反馈脉冲当量。
对于直线光栅尺,若每mm刻线密度50线,不做电子细分,只做经典的4倍频,则每个4倍频后的反馈脉冲对应的位移增量就是5um,这个5um可以称之为直线光栅尺的检测分辨率,也可以称之为反馈脉冲当量。
回到旋转式驱动的直线运控来看,既然存在每转指令分辨率(脉冲数),或者存在每转反馈分辨率(脉冲计数),对应到直线运动的负载端,就存在每个指令脉冲或反馈脉冲对应的理论位移增量,这个位移增量就是脉冲当量,与每转指令脉冲分辨率对应的就是指令脉冲当量,与反馈脉冲分辨率对应的就是反馈脉冲当量。
总之,脉冲当量是站在机械传动系统设计的角度上去看,的确不是站在伺服驱动器的执行角度去看。因而,正如兄台所言,普通的伺服驱动和PLC都只需知道自己该走的脉冲数/计数值即可,无需知到被驱动对象的脉冲当量到底是多少。
个人以为,不必过分拘泥于此间说法的差异,这里没有技术上的大是大非问题,甚至不存在正误对错之别。
最后,欣见兄台终于摒弃了与那七窍通了六窍者的无谓辩驳。
发表于:2012-03-31 10:41:53 10楼
谢谢各位的精彩分享!学习了!


正弦编码器的刻线排列、检测正弦波形、解析4倍频的结构和原理
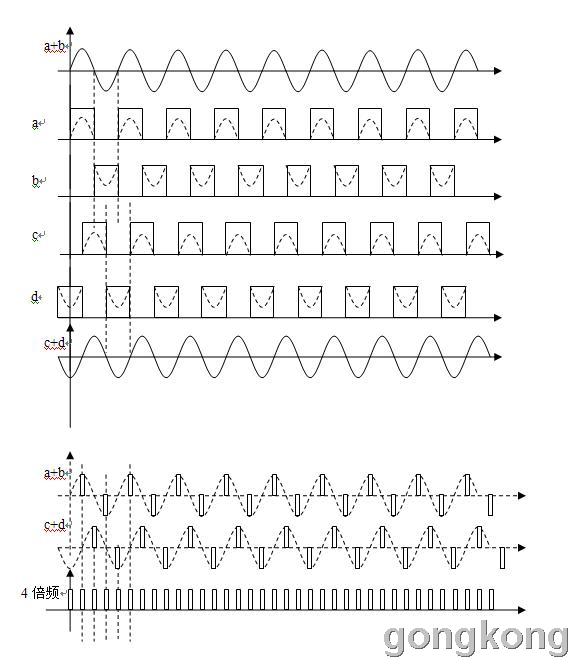
如图:
1、正弦编码器的刻线参数和排列规则:
1)刻线宽度与刻线间隔相等;
2)有4条相同刻线数的刻线a、b、c、d,排列方法如图所示;
3)a、b(或c、d)刻线与间隔错开;
4)a、c错开90°
2、检测波形的合成:
1)每条刻线检测到的模拟信号强度是正弦波形的半周;
2)a+b合成正弦波形,c+d合成正弦波形,两个正弦波形互差90°;
3、4倍频解析脉冲形成原理:
1)每个刻线的正弦半波,整理产生1个方波脉冲;
2)4条刻线解析合成4倍频方波脉冲;

- 电压过低对电机的运转有影响...
 [1399]
[1399] - 电源电器擂台第六十一期--电...[3212]
- 变频器与软启动的区别.doc[1998]
- (已结束)电源电气擂台第七十...[1678]
- 那位朋友知道220V电机多大功...[4966]
- 海拔高度对电气产品的影响[1259]
- (已结束)电源电器擂台第一期...[1808]
- 厉害了,阿伯伯(ABB)2017ACW现...[828]
- 设备上急停按钮开关应该使用...[13345]
- 全国电工进网作业许可考试高...[7006]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
