ABB机器人工具负载设定 点击:1637 | 回复:1

发表于:2019-09-18 17:21:50
楼主
在新机器人的后期调试工作中,前期某些数据设定是极为重要的,如工具负载的设定。下面,小编会为大家带来ABB机器人该如何设定工具负载:
第一步、把机器人3、4、5、6轴摇到零位,确认机器人周围没有干涉物品。
第二步、然后,点击程序编辑器,进入如下界面:

第三步、选择调用例行程序,选择LoadIdentify,点击转到,进入如下界面:


第四步、点击开始键,示教器会显示提示信息点击OK确认,选择工具TOOL,点击两次OK确认,显示界面如下:

第五步、选择2号(未知工具负载)点击确定,接着选择+90或是-90,弹出提示窗口选择YES,点击MOVE,点击MOVE后机器人开始动作切记确认机器人旁没有干涉物以免发生碰撞,显示如下界面:

第六步、机器人动作过程中及结束后会弹出下面窗口:
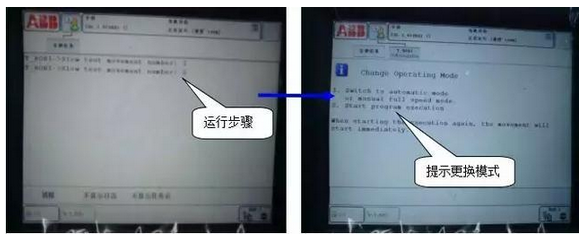
第七步、把机器人打到自动模式,按下启动按钮,点击开始,机器人将自动运行,切记在自动运行时注意机器人有无干涉现象,运行结束后会弹出下面窗口:

点击OK会弹出负载参数对照一下工具上标定的负载重量是否准确,若误差很小则保存参数,若相差很大则需重新标定负载参数。
最后,工具负载在机器人运作时,有很大的作用,所以我们需要正确设定工具负载。需要注意的是,在设定过程中,要明确工具的具体重量,注意机器人管线包是否干涉。而且自动模式下运行速度较快,要确认周边设备及自身的安全。如果做好了这些,那么就能够保证机器人加减速正常,延长机械寿命等。






热门招聘
相关主题
- (伺服与运动控制]详述电子凸...
 [2955]
[2955] - 工业机器人用减速机资料[1155]
- 那智不二越机器人拆跺、码垛功...[1948]
- OTC焊接机器人常见故障代码及...[7078]
- 机器人精华帖整理汇总!(1603...[6560]
- denso 机械手伺服马达损坏 编...[2988]
- 6轴机器人运动控制卡选型[1606]
- RobotStudio中文手册(度娘要...[3364]
- 有没有关于法兰克M-10iA/12机...[1785]
- 昨天遇到一个家伙,直接给机器...[931]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
