ABB机器人数据的备份与恢复方法教程——ABB机器人 点击:2803 | 回复:0

定期对ABB 机器人的数据进行备份,是保证ABB机器人正常工作的良好习惯。ABB机器人数据备份的对象是所有正在系统内存运行的RAPID程序和系统参数。当机器人系统出现错乱或者重新安装新系统以后,可以通过备份快速地把机器人恢复到备份时的状态。
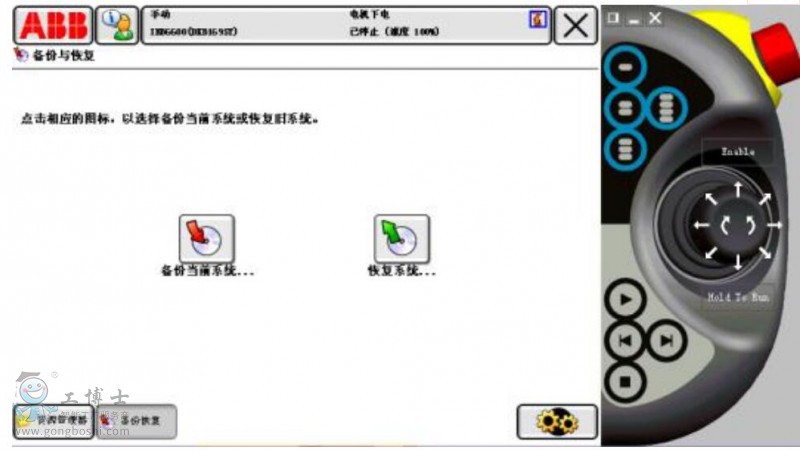
1.对ABB机器人数据进行备份的操作
单击“备份当前系统...”按钮。
单击“ABC...”按钮,进行存放备份数据目录名称的设定。
单击“...”选择备份存放的位置(机器人硬盘或USB存储设备)。
单击“备份”进行备份的操作。
等待备份的完成。
备份恢复在进行恢复时,要注意的是,备份数据是具有**一性的,不能将一台机器人的备份恢复到另一台机器人中去,这样做的话,会造成系统故障。
要想迅速恢复系统,合法的备份是必须的
(1)备份还包含一些系统信息,以便使系统回到备份发生时的状态,如果系统的行为不正常!
(2)编程点位丢失!
(3)软件升级或替换之
ABB建议在以下时间执行备份:
(1)在安装新RobotWare之前
(2)在对指令和/或参数做任何重要修改之前
(3)在对指令和/或参数做了任何修改并测试成功之后,用来保留新的成功的设置
备份之前应该考虑的因素!
(1)IRC5可以安装几个系统!
(2)永远不要忘记检查哪一个才是当前被激活的系统
系统备份的步骤
步骤1、打开ABB主菜单
步骤2、点击备份与恢复,打开备份与恢复窗口。
步骤3、在备份与恢复窗口中,点击备份当前系统…
步骤4、在备份当前系统窗口中,点击ABC…给生成的备份文件夹命名,点击…选择生成备份文件的路径。然后点击备份。
切记:
(1)给备份起个具有可描述性的名字
(2)保留创建备份文件时的日期
(3)将备份文件存在一个安全位置
ABB机器人单轴运动的手动操纵
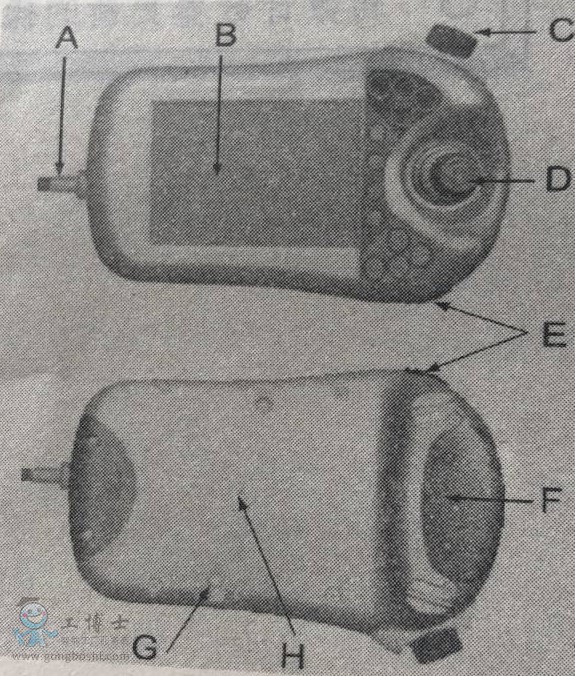
一般地,ABB机器人是由六个伺服电动机分别驱动机器人的六个关节轴(图2-9), 那么每次手动操纵一个关节轴的运动,就称之为单轴运动。以下就是手动操纵单轴运动的方法。
将控制柜上机器人状态钥匙切换到中间的手动限速状态。在状态栏中,确认机器人的状态已切换为“手动”。单击“ABB”按钮。
操纵杆的使用技巧:可以将机器人的操纵杆比作汽车的节气门,操纵杆的操纵幅度是与机器人的运动速度相关的。操纵幅度较小,则机器人运动速度较慢。操纵幅度较大,则机器人运动速度较快。所以大家在操作时,尽量以小幅度操纵使机器人慢慢
运动,开始我们的手动操纵学习。
更多ABB机器人技术支持网站:http://abb_robots.gongboshi.com/
ABB机器人更多实用操作技能请点击:ABB机器人





- FANUC机器人简易零点标定和零...
 [4494]
[4494] - WorkVisual 3.0[2216]
- ABB机器人如何读取各轴的扭矩...[1563]
- 第一讲 第三节 ABB机器人示教...[36759]
- DX200并行IO说明书中文版[2331]
- ABB机器人IRB760码垛程序[1513]
- ABB指令说明书 最新原版中文[1500]
- 这个玩意烧的真是不好玩,机器...[1322]
- 发个ABB IRC5控制柜及机器人...[15616]
- 发那科机器人modbustcp使用手...[1923]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
