疆鸿智能EtherCAT牵手DeviceNet库卡机器人:汽车玻璃产线的无界对话 点击:92 | 回复:0

疆鸿智能EtherCAT牵手DeviceNet库卡机器人:汽车玻璃产线的无界对话
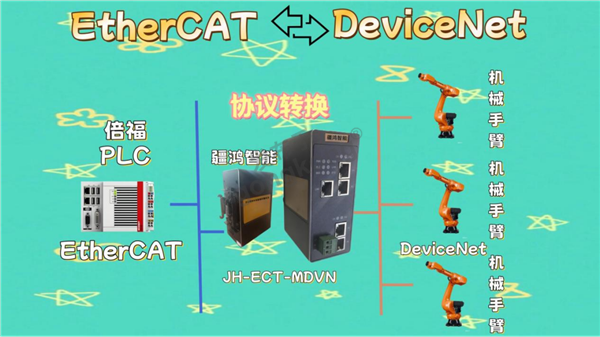
在近期某汽车玻璃制造工厂的升级项目中,我面临一个典型的异构网络对接需求:现场需新增多台库卡焊接机器人及其控制器,这些控制器仅支持DeviceNet从站协议。而产线原有的控制系统是基于倍福(Beckhoff)的EtherCAT主站架构。如何在不更换现场设备、不改变原有控制逻辑的前提下,实现新旧系统的无缝融合,成为项目调试的关键。在该方案中,疆鸿智能EtherCAT转DeviceNet网关扮演了核心的桥梁角色。
具体连接方式如下:
- 主站侧(EtherCAT网络):网关作为倍福PLC的EtherCAT从站设备接入。在TwinCAT开发环境中,通过加载网关配套的XML设备描述文件,可以像添加常规EtherCAT端子模块一样,将网关映射到IO配置树中。主站通过标准CoE(CANopen over EtherCAT)对象字典与网关交换过程数据。
- 从站侧(DeviceNet网络):网关则作为DeviceNet主站,通过专用的DeviceNet接口向下挂载所有焊接机器人控制器。这些机器人作为DeviceNet从站,需预先分配独立的MAC ID,并设置匹配的波特率。网关负责轮询各从站,集中管理DeviceNet网络上的数据交换。

网关在通讯中的核心作用
从工程师视角来看,网关的价值不仅在于物理层的信号转换,更体现在以下几个关键层面:
1. 异构协议的透明化映射:
网关内部完成了EtherCAT(基于以太网的实时协议)与DeviceNet(基于CAN的位总线协议)之间的完整协议栈转换。它将PLC侧EtherCAT主站下发的控制指令(如启动、速度给定、焊接参数选择)实时打包为DeviceNet的显式或隐式报文,发往对应的机器人控制器。同时,机器人反馈的状态信号(如当前位置、故障代码、焊接完成信号)则被网关采集并映射回EtherCAT的过程数据对象,供PLC逻辑扫描。对于PLC工程师而言,操作这些机器人就如同操作本地EtherCAT端子模块上的IO一样直观,无需关心底层的DeviceNet通讯细节。
2. 数据映射与地址路由:
由于EtherCAT和DeviceNet的数据格式、传输机制不同,网关具备灵活的数据映射功能。在配置软件中,工程师可以将PLC发送的特定字节或位,精确路由到指定DeviceNet从站的特定地址。例如,将TwinCAT中的一个16位整数输出,映射到2号机器人的预设速度寄存器。这种“点对点”的精准数据路由,是实现复杂运动控制和工艺协同的基础。
3. 时钟同步与实时性保障:
汽车玻璃加工对机器人的协同动作有严格时序要求。网关作为智能节点,能处理DeviceNet网络的隐性报文轮询和EtherCAT周期通讯之间的时序关系。它内置缓冲区,确保来自EtherCAT主站的高速指令不会因DeviceNet网络的轮询周期而丢失,反之亦然,从而保证了整个系统响应的确定性和同步性。

总结
在该汽车玻璃加工项目中,EtherCAT转DeviceNet网关的应用,成功解决了高端PLC与既有DeviceNet设备间的互联壁垒。它不仅仅是接口转换器,更是一个智能的数据路由与协议翻译中心。通过它,我们可以最大限度地保护既有设备投资,同时构建一个统一、高效、可维护的控制网络。对于自动化工程师而言,掌握这类网关的配置,意味着拥有了打通不同工业通讯“孤岛”的钥匙,是实现智能制造产线柔性集成的必备技能。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
