【体验有礼】工控网AI智能问答来喽 点击:975 | 回复:27

随着AI的飞速发展,我们的日常工作也越来越离不开它了,近日工控网携手前沿AI技术,倾力打造了全新的"工控一点通"人工智能平台。致力于将智能化、自动化的解决方案带给每一位工业控制领域的用户。
智启工控 —— "工控一点通"
平台功能:
智能问答:体验"工控一点通"的智能问答功能,获取快速、准确的工控技术解答。
专业领域覆盖:涵盖工业自动化、智能制造等多个专业领域,满足您的工控多样化需求。
每日限额体验:目前每人每天享有10次问答机会,让您充分体验AI的便捷与强大。
欢迎大家在“工控一点通”提出自己在工业控制领域的疑问或需求。完成体验后,回帖提交您的宝贵意见。优秀意见将有机会被采纳,优化平台功能,提升用户体验。
参与福利:
优秀参与用户:5名 奖励制冷风扇

有效参与用户:奖励100论坛积分





楼主最近还看过



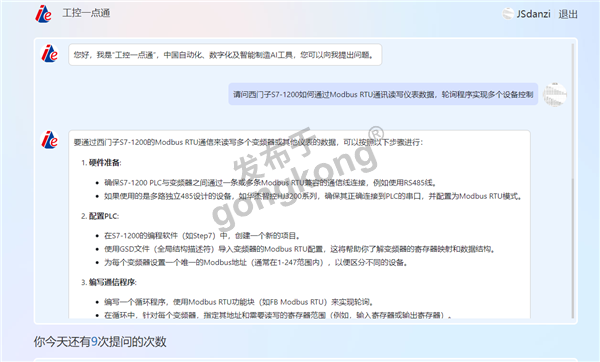
间隔很久了,它还是不回答我。可能是网络问题,也可能它对Modbus这个词不感冒
建议优化训练数据,Modbus是一个很常用的词汇了,可以增加更多有关Modbus通信的训练数据,去训练AI,包括不同难度层次和不同应用场景的相关内容。
也可以改进搜索算法,优化搜索和匹配机制,这样我们或许就能更准确找到我们所需要的东西。当然具体算法改进我就不懂了。
增强领域专业性,比如针对Modbus、profinet等特定的技术领域进行更深入的专业知识训练,不仅仅是Modbus和profinet,比如还有CCLink、profibus等等
另外,还要提升一下响应速度,说实话,咱们的论坛本身问题就不少,动不动就有问题,帖子打不开,发帖发不了,我觉得整个网站包括这个AI都需要优化,进步空间还很大
还有,最好专门开一个帖,收集整理用户的一些建议和反馈,这样也可以做到有针对性的改进啊
还有,就是增加一些互动性,多邀请用户去使用这个工具,把一些好的内容收集整理起来,逐步完善。做到定期更新对应关键字的知识库,比如Modbus的、比如CCLINK的等等,亦可建立一些热门话题或者热门关键字的优先级,这样能及时回复,你看看我都打了这么多字了,它还在思考当中。
回复本条
-
 体验还不错,适合啥都不知道的起码能指导一些方向,再此基础上再继续深入应该能解决相应工控问题!
体验还不错,适合啥都不知道的起码能指导一些方向,再此基础上再继续深入应该能解决相应工控问题!
在遇到难缠的客户问题时,作为工业设备供应商,最好的处理办法是:
利用专业资源:利用公司的客服和技术支持服务。例如,对于西门子工控产品,可以拨打技术支持热线寻求帮助。他们通常会提供专业的解决方案,如案例分析、产品手册或技术论坛上的资源。
详细描述问题:清晰、准确地向技术支持描述问题的症状,包括任何错误代码、异常行为或设备配置信息,这有助于工程师更快定位问题。
听取建议:如文中所述,工程师可能会给出可能的解决方案,如检查硬件连接、查找类似问题的论坛讨论或查阅产品手册。
实施并验证:按照建议进行操作,并在可能的情况下,现场测试以确认问题是否得到解决。如果需要,可以进一步调整参数、配置或规格。
学习和预防:将解决过程记录下来,作为以后遇到类似问题的参考,同时也可以反馈给产品团队,帮助改进产品设计或用户指南。
保持专业:在整个过程中,保持耐心和专业态度,即使面对复杂的问题,也能体现你的专业素养,提高客户满意度。
记得,解决问题的关键在于沟通和利用所有可用的资源,而不是独自承受压力。
回复本条
-


下面是荣耀手机回答的:
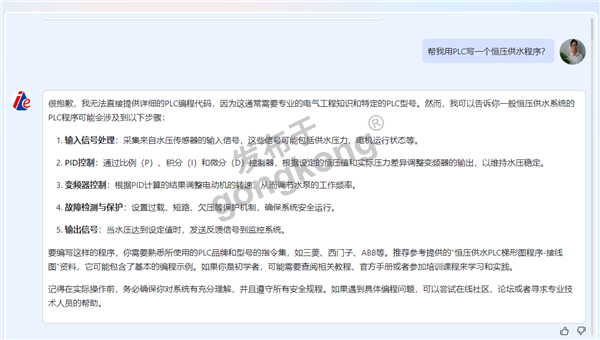
编写一个恒压供水程序涉及多个步骤,包括硬件设置、PLC编程和可能的PID(比例-积分-微分)控制算法实现。
由于我不能直接为你提供一个特定于某个PLC品牌的完整代码,我将给出一个概念性的流程和伪代码来帮助你理
解如何开始。
1. 硬件需求
PLC:具有模拟输入(用于读取压力传感器信号)和模拟输出或数字输出(用于控制变频器/泵电机)。
压力传感器:测量水管中的水压。
变频器/泵电机:根据PLC的指令调节水泵的速度。
2. PLC编程流程
初始化阶段
设置I/O地址映射:确定哪些地址用于读取压力传感器的值,哪些地址用于发送控制信号到变频器。
设定目标压力值:在程序中设置一个期望的水压值。
主循环阶段
读取压力值:从压力传感器的模拟输入中读取当前水压值。
计算误差:将当前水压值与目标压力值进行比较,得到误差。
PID控制:使用PID控制器基于误差来计算所需的调整量。这通常涉及到三个参数:比例(P)、积分(I)和微分(D),
它们需要根据你的具体系统和需求进行调整。
比例项:误差的直接反应。
积分项:对过去误差的累积效应进行补偿。
微分项:预测未来误差的变化趋势并进行补偿。
输出控制信号:将PID控制器的输出转换为适当的控制信号发送到变频器,以调整水泵的速度。
错误处理和监控
添加必要的错误处理逻辑,例如当检测到异常时停止水泵并发出警报。
监控系统的状态,确保它按预期运行。
3. 伪代码示例
以下是一个简化的伪代码示例,展示了如何在PLC中实现恒压供水的核心逻辑:
// 假设变量定义如下:
// current_pressure: 当前水压值(从传感器读取)
// target_pressure: 目标水压值(预设值)
// error: 当前水压与目标水压之间的误差
// pid_output: PID控制器的输出
// control_signal: 发送给变频器的控制信号
// 初始化阶段
target_pressure = SETPOINT // SETPOINT是预设的目标水压值
pid_parameters = {Kp, Ki, Kd} // Kp, Ki, Kd分别是比例、积分和微分的系数
// 主循环阶段
while (true) {
current_pressure = read_sensor() // 从传感器读取当前水压值
error = target_pressure - current_pressure // 计算误差
pid_output = pid_controller(error, pid_parameters) // 使用PID控制器计算输出
control_signal = convert_to_control_signal(pid_output) // 将PID输出转换为控制信号
send_control_signal_to_inverter(control_signal) // 发送控制信号到变频器
// ... 其他错误处理和监控逻辑 ...
}
// PID控制器函数伪代码
function pid_controller(error, parameters) {
// 这里应该包含PID算法的具体实现
// 返回计算得到的PID输出值
}
请注意,这个伪代码只是一个起点,你需要根据你的具体需求和所使用的PLC品牌来调整和扩展它。
此外,你可能还需要考虑其他因素,如安全限制、系统响应时间等。
回复本条
-






 可以写程序就完美了
可以写程序就完美了体验不错😄
回复本条
-
多问几个问题
2024-07-10 10:10:26回复
回复 @fighting2021: 每天10次
2024-07-10 10:12:32回复

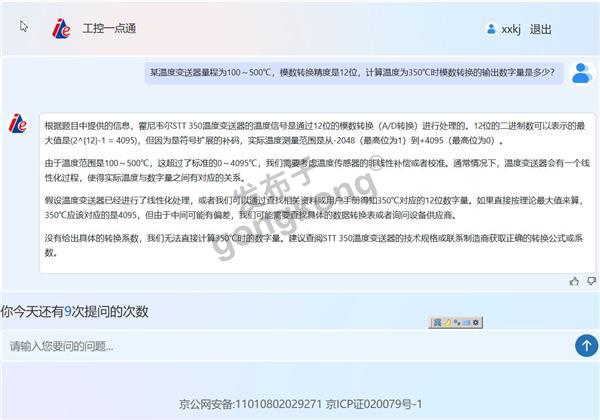


 对于所提问题的连续性可能存在逻辑上的理解错误。
对于所提问题的连续性可能存在逻辑上的理解错误。 对接厂家的数据可能比较缺乏
对接厂家的数据可能比较缺乏 对于具体的电气元件故障好像没有专门的模型检索。
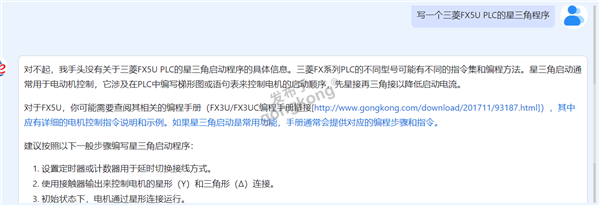
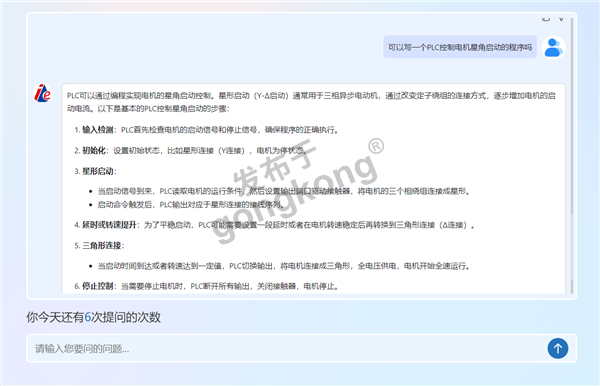
对于具体的电气元件故障好像没有专门的模型检索。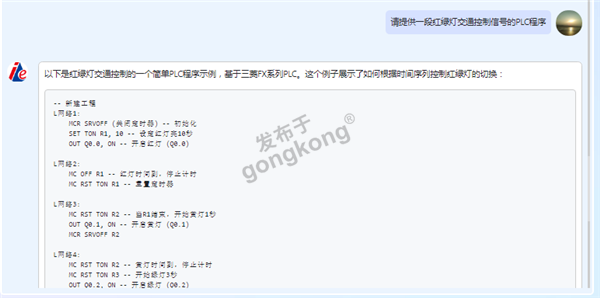 这个功能还是可以,一般的通用PLC程序应该没有问题。
这个功能还是可以,一般的通用PLC程序应该没有问题。
官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
