求助大神,Epson机器人和海康视觉配合问题 点击:1252 | 回复:6







楼主最近还看过


发表于:2022-04-02 14:23:39
3楼
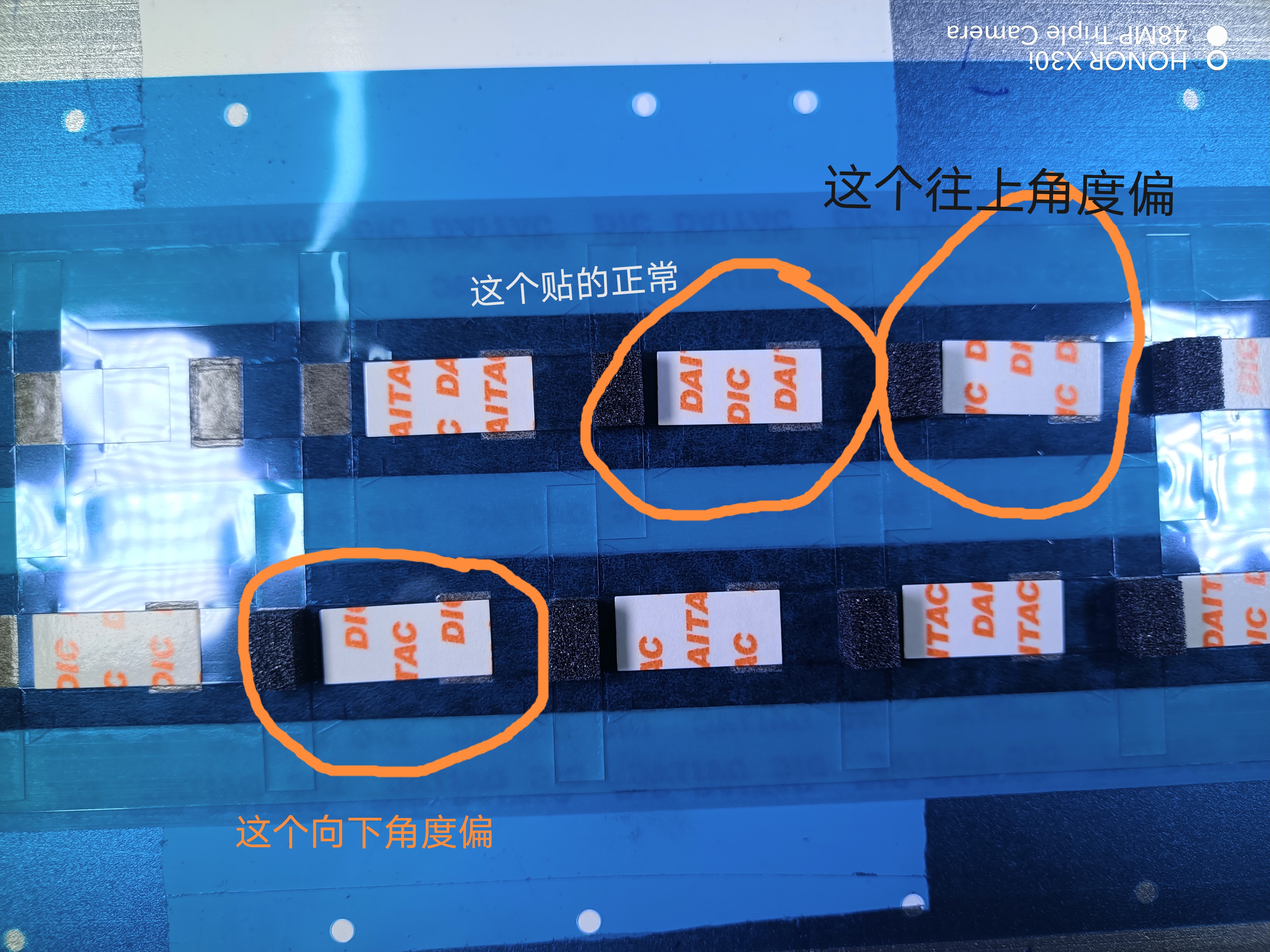
首先你第一个供料后A视觉定位目的是为了将取膜的位置做了纠偏,B视觉定位是定位物料位置引导机械手,2个视觉标定引导首先检查
1是否是用的同一个工具坐标系和工件坐标系(没有新建的话就是默认工作坐标系),
2视觉引导数据的类型,不要用INT,要用REAL,视觉算出来是小数点,你要是用INT,机械手会自动给你四舍五入为整数
3视觉引导位置做一个WAIT 0.1的等待延时消除机械手的抖动,我之前做过测试在速度不一样的情况下视觉计算出的引导数值浮动很大,海康的大概在0.1-0.2之间。
4做一个A视觉纠偏取膜程序后,固定去一个点贴膜,观察贴膜后的一直性高不高,若是高的话,在做B视觉引导时一定要注意视觉标定时X Y U 方向要与A视觉引导的X Y U方向一致。
5从你的程序上看 你的dianjiao1_2这个点的工具坐标系和工件坐标系必须是视觉A/B标定时用的坐标系才能满足你对这个点X Y U 的处理

热门招聘
相关主题
- ABB机器人操作手册
 [789]
[789] - 发那科机器人干涉区问题求解[1232]
- ABB机器人培训资料之五,一共...[4067]
- 发那科机器人GSD[1657]
- robotstudio6.03.01注册表修...[1198]
- 一款机器人的总装图[10192]
- ABB机器人 TCP/IP 协议 字符...[4741]
- KUKA.WorkVisual_V5.0.9_Bui...[821]
- 安川FS100 INFORM 中文解说书...[1426]
- 那智不二越机器人拆跺、码垛功...[1949]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
